Ориентироваться на Луне задача куда сложнее, чем может показаться с Земли. На Луне нет GPS, нет привычных дорог, а горизонт коварно близок. Из-за малой кривизны Луны и отсутствия атмосферы объекты на расстоянии пары километров исчезают из виду.
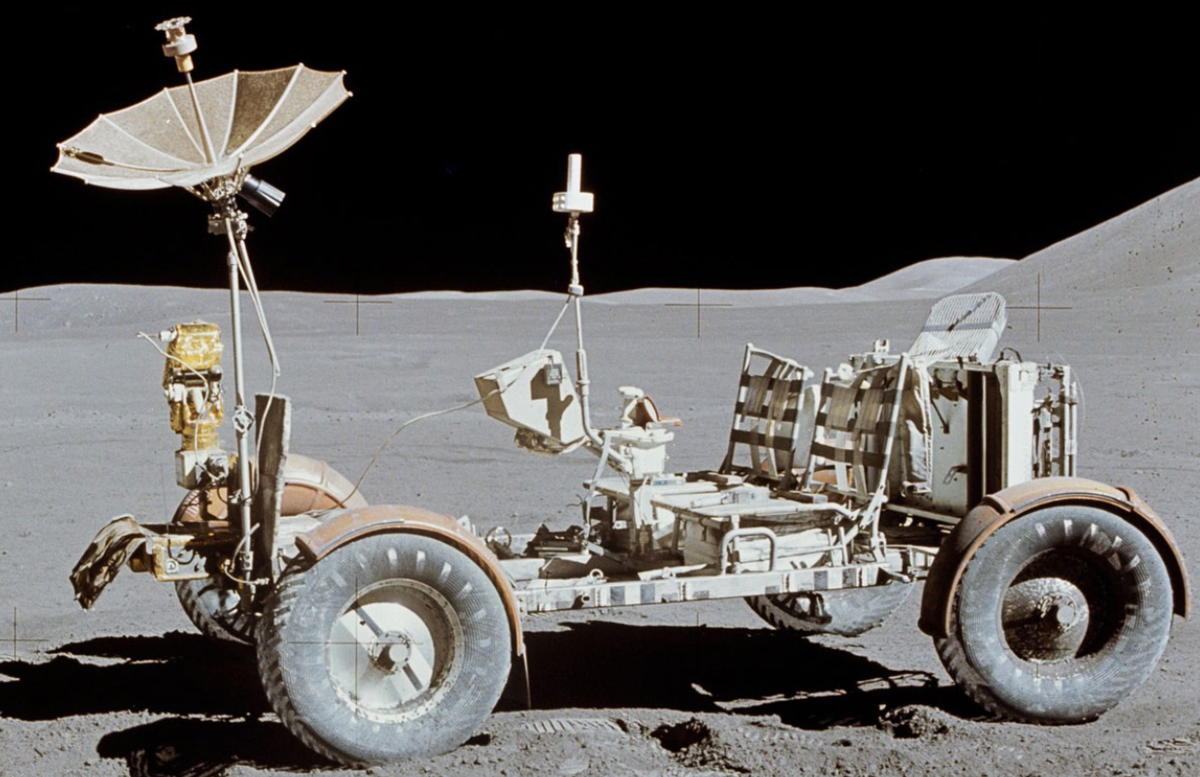
Тем не менее экипажи Аполлонов катались на своих луноходах на расстояния до 7 километров от посадочного модуля и почти всегда возвращались точно по плану. Как им это удавалось?
Навигационная система лунного ровера была удивительно простой, но гениальной по эффективности.
Основу составлял гироскоп направления или механический компас, который фиксировал повороты ровера относительно начального направления, заданного на старте. Его показания дополнял одометр, по сути тот же счётчик пробега, что и в автомобиле. Вместе они позволяли вычислять пройденный путь и угол отклонения от начального маршрута.
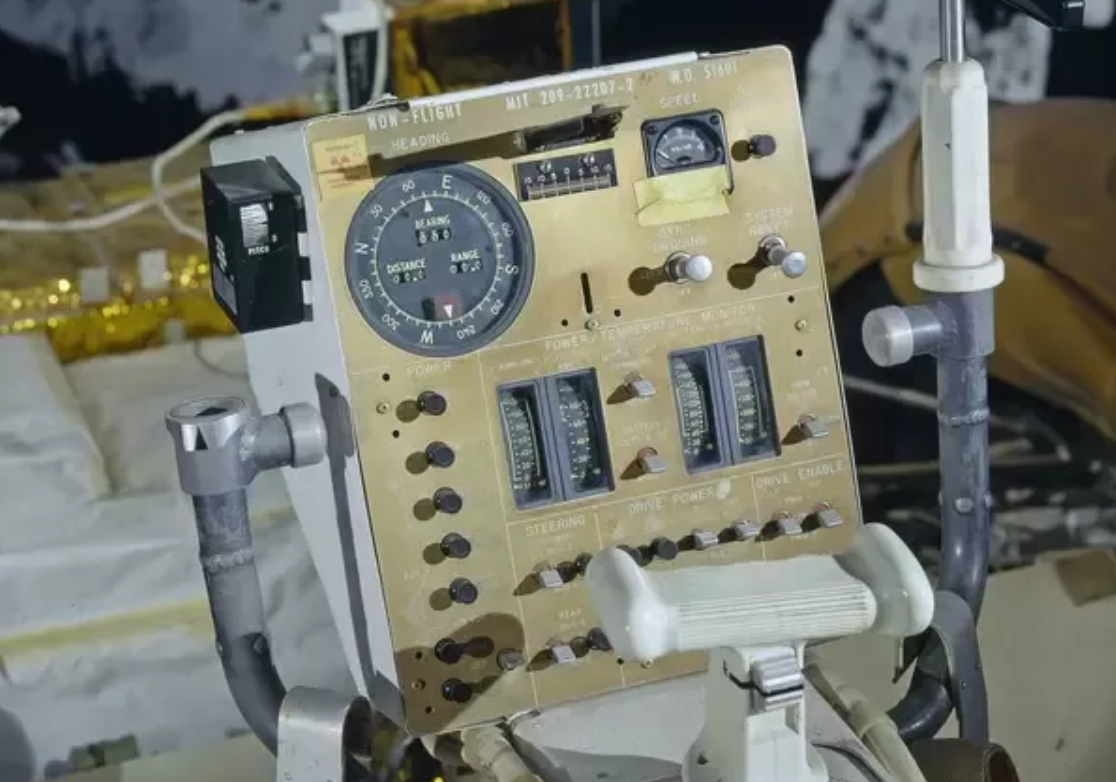
На каждом из четырёх колёс стояли датчики оборотов, которые подсчитывали, сколько раз колесо повернулось с момента старта. Зная диаметр колеса (около 82 см), система могла пересчитать количество оборотов в пройденное расстояние с точностью до пары метров на километр пути. Чтобы ошибка не накапливалась из-за пробуксовки, показания всех колёс усреднялись — если одно колесо буксовало или висело в воздухе, это почти не влияло на результат. Одометр был связан с бортовым компьютером - небольшим аналоговым прибором, который в реальном времени суммировал пройденное расстояние и отображал его астронавтам на панели управления. Он же фиксировал повороты относительно начального курса. Получалось что-то вроде примитивного спидометра и карты в одном лице: космонавты всегда знали, сколько километров осталось до лунного модуля и в каком направлении он находится.
Но одного этого было мало, ведь ошибка гироскопа или одометра могла накапливаться. Поэтому астронавты дополнительно использовали бумажные карты местности, которые готовились по снимкам орбитальных миссий. Сопоставляя видимые кратеры и каменные поля с картой, они уточняли своё положение.
Третьим инструментом был солнечный индикатор - датчик, который показывал угол направления на Солнце. Это работало как гигантские солнечные часы: если знать, где Солнце находится в конкретный момент миссии, можно понять, в какую сторону движется ровер.
И наконец, в крайнем случае астронавты пользовались самым простым способом навигации - возвращались по собственным следам. В вакууме Луны следы колёс не разрушаются ветром или дождём, так что можно просто развернуться и ехать обратно по колее, как по нарисованной линии.
Также есть информация, что на основном модуле стоял радиомаячок, который мог подстраховать их в случае проблем с другими методами определения положения.
Совокупность этих методов создавала своеобразный аналог GPS, но полностью механический и независимый от спутников.
Ошибка навигации даже на длинных маршрутах редко превышала пару сотен метров, что для Луны — великолепный результат.
По сути, астронавты доказали, что исследовать чужой мир можно без сложных компьютеров и космических навигационных сетей, если у тебя есть немного математики, наблюдательность и прямые колеи на сером реголите.
Советские луноходы шли другим путём. Ими просто управляли с Земли, глядя на изображение с бортовых камер. Маршрут прокладывали операторы, сверяясь с картами, а для ориентации использовались солнечные датчики и астрокорректоры. Сложных гироскопических систем не требовалось — луноход мог просто остановиться и ждать следующей команды, в отличие от американского ровера, экипаж которого должен был успеть вернуться к модулю до конца кислорода.
Интересно, что сама идея «указывающего» механизма не нова. Ещё в древнем Китае существовало устройство под названием тележка, указывающая на Юг. Оно представляло собой повозку с системой шестерён, которая сохраняла ориентацию фигуры, указывающей на юг, независимо от того, куда поворачивала сама телега. По сути, это был чисто механический гирокомпас. Изначальное направление фиксировалось, а дальше взаимосвязь колёс заставляла фигурка всегда занимать указывающее на юг расположение. Принцип его работы удивительно напоминает лунный ровер: счётчик пути и механическая система отслеживания направления помогали не потеряться, даже если местность однообразна.
Хочется помочь проекту? Просто поставьте лайк 👍 и подписывайтесь на канал ✔️! Напишите комментарий и поделитесь статьёй с друзьями