
На сегодняшний день для БПЛА особо актуален вопрос точности навигации. Точность навигационного решения сильно влияет на выполнение поставленной задачи для конкретного летательного аппарата. Самым востребованным вариантом обеспечения точности навигации является комбинация ГНСС-приёмника и инерциального модуля (ИМУ). Такой подход помогает летательному аппарату безошибочно решать задачу навигации.
Для навигации БПЛА в условиях спуфинга и джаминга, когда сигнал ГНСС искажен шумами или подменён ложными данными и не обеспечивает нужной точности, необходимо использовать альтернативные решения. Одним из вариантов решения проблемы является интегрирование сырых данных БЧЭ (блока чувствительных элементов) по трем осям, для чего может быть использован NSI313 от Navigation Systems.
В связи с растущим спросом на данный модуль, инженерами компании Теллур Электроникс было принято решение наглядно продемонстрировать его возможности. В частности, будет рассмотрено поведение БПЛА в автономном режиме работы при использовании данных с NSI313.
В качестве полётного задания была поставлена задача удержания постоянной высоты аппарата на уровне 500 метров в течение трёх минут при скорости движения 80 км/ч. Основной задачей исследования являлась оценка роста навигационных ошибок во времени. В рамках данной задачи были использованы паспортные характеристики датчика NSI313, а также показания смещения нуля в состоянии абсолютного покоя датчика при температуре –45 градусов Цельсия. На основе этих данных был реализован разомкнутый алгоритм навигации в программе MATLAB, и получены данные о нескольких основных параметрах движения БПЛА:
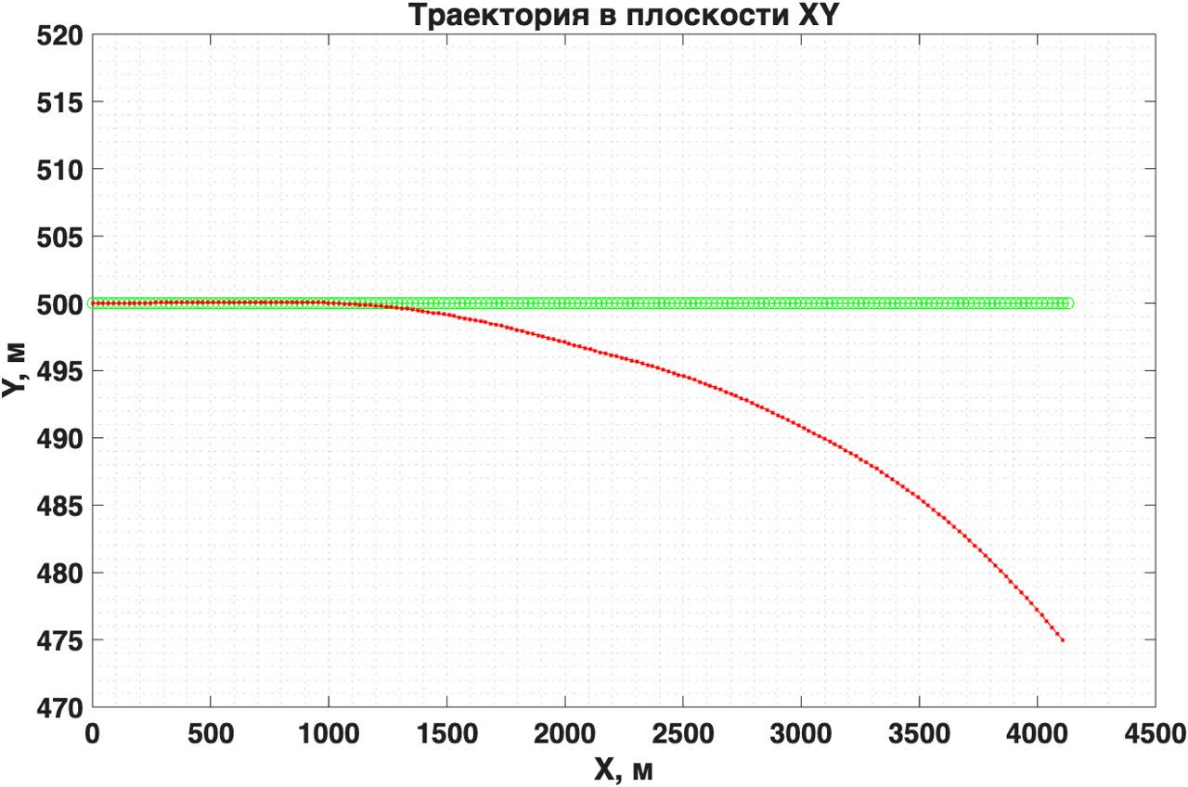
Согласно данным графикам, использование модуля NSI313 даёт возможность аппарату сохранять необходимое положение на протяжении 1–2 минут с достаточной точностью, обеспечивая продолжение полётного задания.
В следующем материале будет рассмотрено влияние погрешностей ИМУ NSI313 на параметры ориентации.
Подробная информация доступна на нашем сайте.
Больше новостей на сайте Теллур Электроникс.