Статья посвящена принципам работы ПИД-регуляторов и методу их настройки по Циглеру-Никольсу. Рассмотрены три составляющие ПИД-регулятора (пропорциональная, интегральная и дифференциальная), их влияние на динамику системы, а также практическое применение метода для управления уровнем жидкости в баке. Материал содержит математические выкладки, схемы и результаты моделирования, что делает его полезным для инженеров, специалистов по автоматизации и студентов технических специальностей.

Введение
Пропорционально-интегрально-дифференциальные (ПИД) регуляторы являются ключевыми элементами систем автоматического управления, обеспечивая высокую точность и стабильность процессов. В данной статье подробно разбирается структура ПИД-регулятора, его составляющие и метод настройки коэффициентов по Циглеру-Никольсу, основанный на экспериментальных данных.
Структура ПИД-регулятора
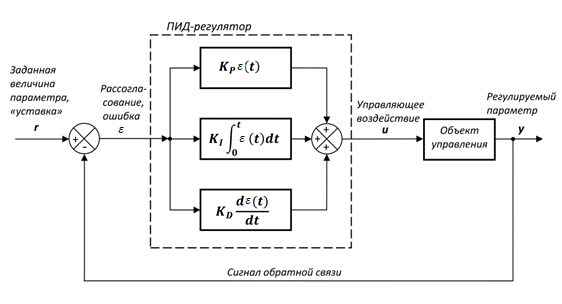
ПИД-регулятор формирует управляющий сигнал как сумму трех составляющих:
- Пропорциональная (KP⋅ε(t)) — реагирует на текущую ошибку регулирования. Чем больше отклонение от заданного значения, тем сильнее корректирующее воздействие. Однако использование только пропорциональной составляющей приводит к статической ошибке.
2. Интегральная (KI∫0tε(t)dt) — устраняет статическую ошибку, накапливая и компенсируя прошлые отклонения. Пример её работы показан на рисунке 3.
3. Дифференциальная (KDdε(t)dt) — учитывает скорость изменения ошибки, что позволяет предсказывать будущие отклонения и улучшать устойчивость системы.
Метод Циглера-Никольса
Метод относится к эмпирическим и включает два этапа:
- Определение границы устойчивости:Система настраивается с использованием только пропорциональной составляющей KP.
Коэффициент KP увеличивается до тех пор, пока в системе не возникнут незатухающие колебания (Рисунок 3). Фиксируются критическое значение KP∗ и период колебаний T∗. - Расчет коэффициентов:По формулам (Таблица 1) вычисляются KP,KI и KD. Например, для ПИД-регулятора:
Пример настройки для системы управления уровнем жидкости
Рассмотрена модель бака с водой (Рисунок 4), описываемая уравнением:
где A=20, a=2, h=10, b=5.
- Установка начальных коэффициентов:
KP=1, KI=0, KD=0. - Постепенное увеличение KP до достижения границы устойчивости:
KP∗=159.9, T∗=0.1с. - Расчет итоговых коэффициентов (Таблица 1):
KP=95.64,
KI=1918.8,
KD=1.2.
Результаты моделирования (Рисунок 6) подтверждают устойчивость системы после настройки.
Заключение
Метод Циглера-Никольса предоставляет простой и эффективный способ настройки ПИД-регуляторов, особенно для систем с неизвестными параметрами. Практическое применение метода продемонстрировано на примере управления уровнем жидкости, где достигнута стабильность и точность регулирования. Для дальнейшего изучения рекомендуется исследовать адаптивные алгоритмы настройки и их применение в сложных динамических системах.