Программирование промышленных роботов традиционно является трудоемким процессом, который часто зависит от пульта управления (teach pendant), оффлайн-инструментов и метода проб и ошибок. Сложность многократно возрастает, когда необходимо скоординировать работу нескольких роботов в общем пространстве, где велика вероятность столкновений и неэффективного использования времени. Учитывая, что в мире используется более 4,3 миллиона промышленных роботов, время, необходимое для их программирования, остается основным барьером на пути масштабирования автоматизации.
Недавно опубликованное исследование в Science Robotics предлагает новое решение этой проблемы. Статья «RoboBallet: Планирование достижения целей несколькими роботами с помощью графовых нейронных сетей и обучения с подкреплением» подробно описывает разработку, проведенную совместно Google DeepMind Robotics, Intrinsic и University College London. Команда создала искусственный интеллект, который использует обучение с подкреплением и графовые нейронные сети (GNN) для генерации планов движений, свободных от столкновений, для нескольких роботов, работающих в общих рабочих зонах.
Ключевая проблема координации
Классические алгоритмы планирования движений могут производить надежные траектории для одного робота. Однако масштабирование этих методов для нескольких устройств, работающих в тесном quarters, становится вычислительно сложной задачей. Инженерам часто приходится тратить значительное время на параметризацию алгоритмов или ручную корректировку траекторий во избежание конфликтов. Новая модель ИИ призвана автоматизировать большую часть этого процесса.
Архитектура решения: графы и обучение на синтетических данных
В основе метода лежит графовая нейронная сеть, обученная с подкреплением на миллионах синтетически сгенерированных сценариев. В этой системе роботы, задачи и препятствия представлены в виде узлов графа, а ребра определяют отношения между ними. Исследователи сообщают, что модель учится планировать траектории методом проб и ошибок, постепенно разрабатывая обобщенные стратегии, которые можно применять к новым, ранее не встречавшимся компоновкам рабочих ячеек.
После обучения система требует только CAD-файлы и описания задач на высоком уровне, чтобы производить планы движений без ручного кодирования, teach-панделей или тонкой настройки. Способность системы обрабатывать «пакеты задач» без детальных пошаговых инструкций делает ее особенно примечательной. Получив набор целей, модель автоматически определяет последовательность действий и соответствующие траектории без столкновений.
Оценка эффективности и практическая результативность
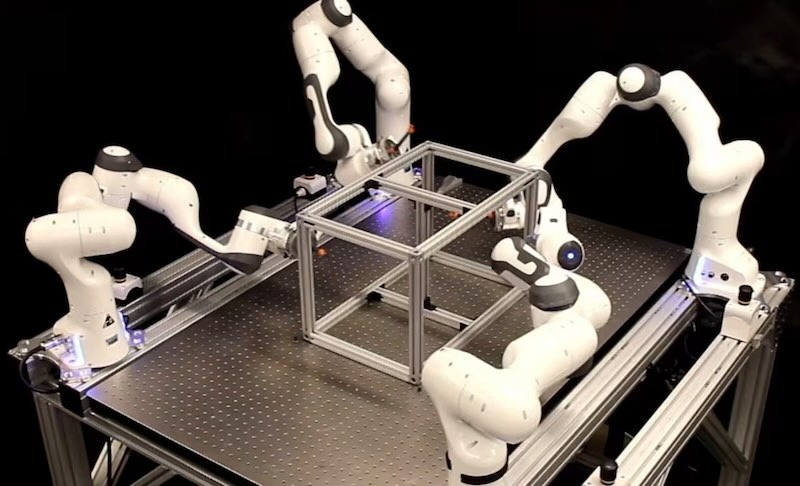
В лабораторных условиях модель генерировала планы движений для групп до восьми роботов, часто производя близкие к оптимальным решениям в течение нескольких секунд.
По данным Intrinsic, подход на основе ИИ показал улучшение качества траекторий примерно на 25% по сравнению с традиционными методами, одновременно продемонстрировав высокую масштабируемость. Например, при переходе с четырех до восьми роботов время выполнения задачи сокращалось в среднем на 60%. Это позволяет предположить, что эффективность может расти вместе со сложностью системы, а не ухудшаться.
Перспективы внедрения и будущее технологии
Команда RoboBallet уверена, что ИИ-планирование может сократить время программирования, повысить гибкость и ускорить адаптацию к изменяющимся проектным решениям или непредвиденным сбоям. В перспективе комбинация этого подхода с системами технического зрения на основе ИИ может позволить роботам перепланировать действия в реальном времени в ответ на динамические изменения в окружающей среде, что еще больше сократит простои.
Читайте также:
Ключевые слова: графовые нейронные сети, обучение с подкреплением, промышленные роботы, координация движений, автоматизация планирования.
Источник информации: The Robot Report
Понравилась статья, ставьте 👍 и подписывайтесь на наш канал, читайте больше новостей на тему робототехники.