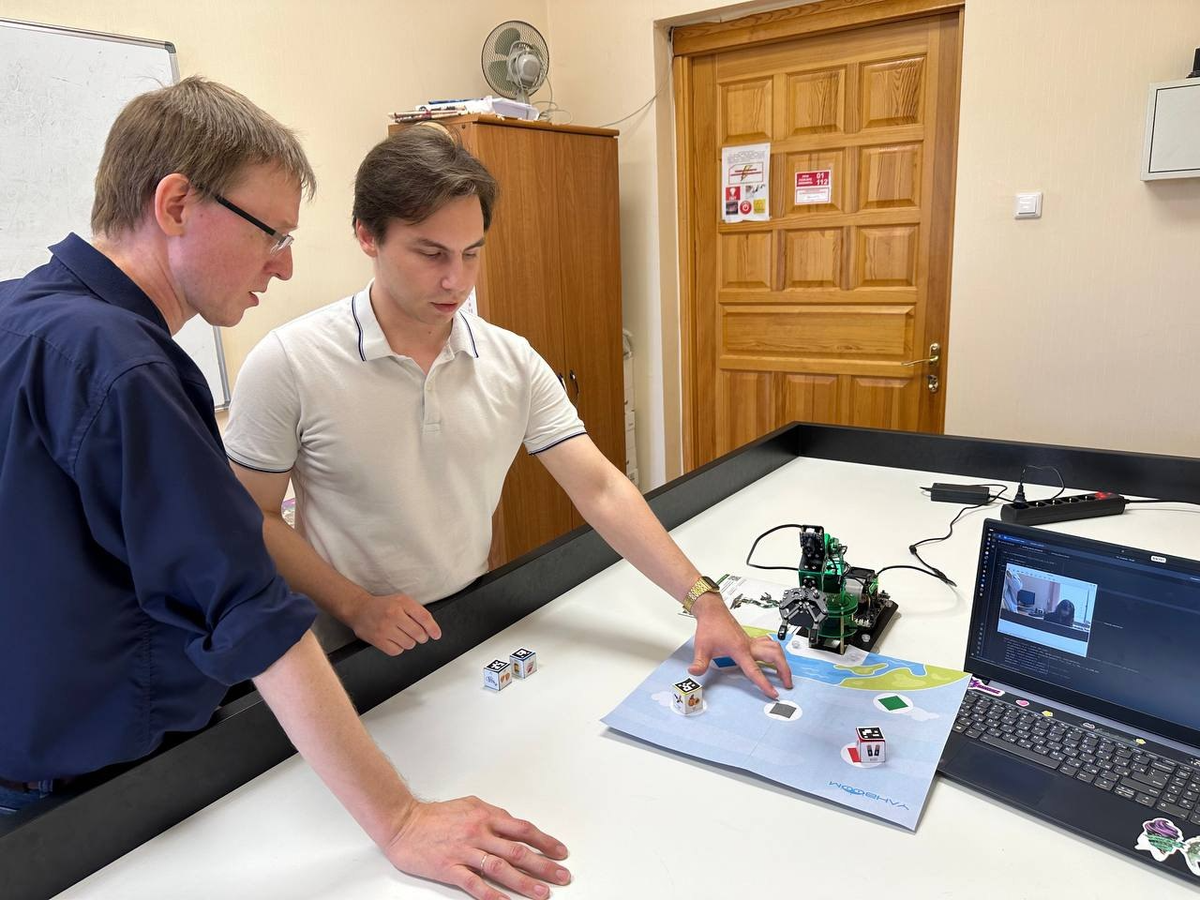
Магистрант математического факультета Глеб Богданов под руководством старшего преподавателя кафедры вычислительной механики и информационных технологий ЧелГУ Сергея Иванова разработал программное обеспечение по реализации сортировки объектов для робота-манипулятора.
Разработка методов сортировки актуальна для роботизированных производств: такие решения лежат в основе автоматизации технологических линий, роботизированных конвейерных сборочных производств, логистических центров сортировки и экстремальной робототехники без участия человека.
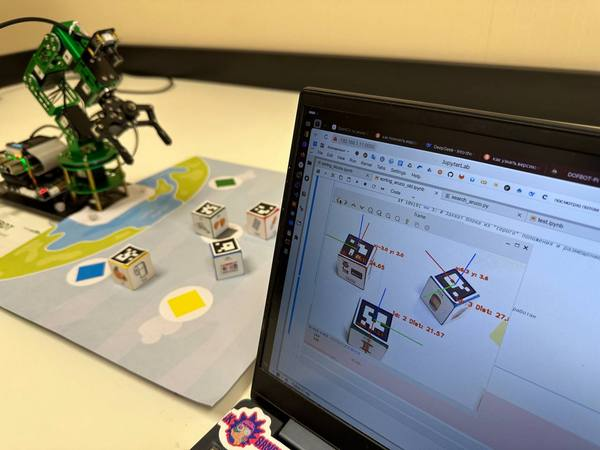
Задачей манипулятора является сортировка с помощью компьютерного зрения. Благодаря алгоритмам компьютерного зрения робот считывает маркер на кубике, затем определяет его положение относительно камеры и переводит в свои координаты. Далее он захватывает и переставляет этот объект по заданным параметрам. Обработка изображений для поиска маркера и определение координат и углов зрения роботом происходит с помощью математических алгоритмов. В рамках тестирования в качестве объекта были использованы четыре цветных кубика с маркерами. С задачей распознать маркеры кубиков и расставить каждый на своё место робот-манипулятор успешно справился.
Уникальность проекта заключается в разработке математических алгоритмов управления и использовании специальной системы маркировки, которая отличается штрих-кодом — ArUco маркером. Маркеры ArUco — бинарные квадратные маркеры с чёрно-белым узором, который легко распознаётся камерой. Каждый маркер имеет уникальный ID и известные геометрические параметры (размер, углы, координаты углов).
«Я применил метод решения задачи в условиях, применимых в практических целях, при которых не нужно вводить дополнительные параметры, что заметно упрощает вычисления и увеличивает скорость работы манипулятора благодаря маркерам, — отмечает Глеб Богданов. — Особенность квадратных маркеров ArUco заключается в возможности лучшего распознавания под различными углами зрения, что расширяет условия для опознавания и облегчает процесс сортировки, в отличие от штрих-кода, который требует перпендикулярного сканирования».
«Благодаря приобретению математическим факультетом ЧелГУ специальных робототехнических наборов различного назначения для учебных целей, в том числе и многозвенного робота-манипулятора, студенты и магистранты получили возможность на практике проверить работоспособность многих методов обработки данных и моделирования решений. Появление специализированных учебных комплектов позволило расширить учебную программу и дать возможность учащимся проявить своё творчество и полученные навыки в математике, программировании и робототехнике, – комментирует научный консультант проекта Сергей Иванов. – Уникальность этой работы заключается в сочетании кодов ArUco с манипулятором, у которого большое количество координатных осей. Глеб совместил систему распознавания, систему управления роботом и управление позиционированием. Он предложил методику, которая позволяет быстрее и с меньшими затратами, осуществлять его движение».
Данная работа открывает много возможностей по дальнейшему развитию и применению в сферах производства, логистики, манипулирования объектами в экстремальных условиях. Маркеры можно применять для многих изделий и предметов, что позволит роботизировать процессы взаимодействия с ними.
Научное исследование магистрант продолжит развивать в области решения задач обратной кинематики: повышение точности и скорости движения, поиск оптимального решения по нагрузке на робота и повышение качества распознавания кодов.