В недавнем эксперименте учёные из ведущих технологических лабораторий создали четырехногие роботы, способные играть в бадминтон с человеком. И, что удивительно, эти машины не просто выполняют команды — они показывают настоящий уровень мастерства, конкурирующий с опытными игроками. Такой прорыв демонстрирует, что развитие роботов, оснащенных искусственным интеллектом, выходит за рамки промышленной автоматизации и становится полноценным участником спортивных соревнований и динамичных сценариев взаимодействия.
Технологика робота — сочетание движений и восприятия
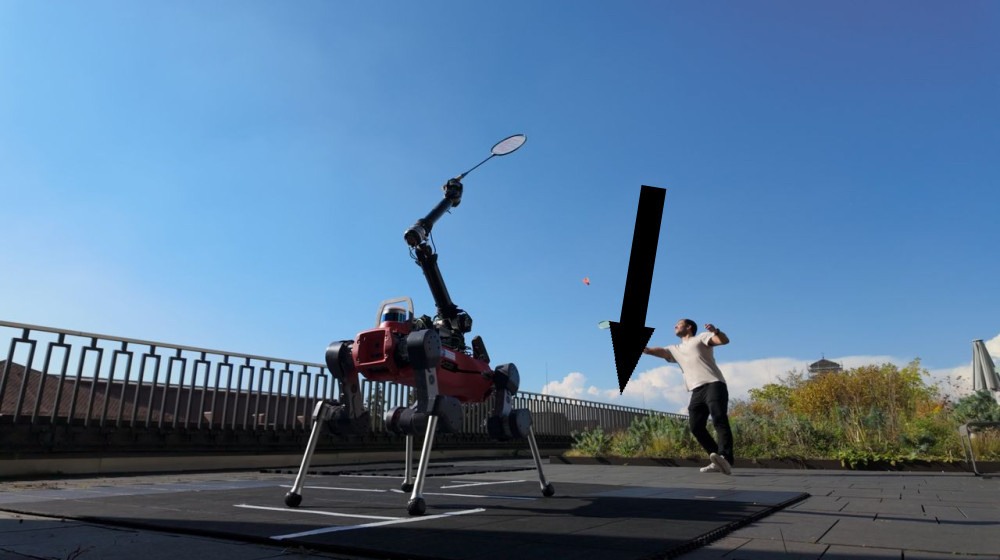
Ключевая особенность этих роботов заключается в их способности к скоординированным движениям всего тела при одновременном анализе визуальной информации. В этих целях был создан прототип по имени ANYmal, который по характеристикам напоминает собаку: он весит около 50 кг, высотой примерно полтора метра и обладает четырьмя подвижными ногами. Благодаря такому строению он легко преодолевает сложные геометрические препятствия и может перемещаться по неровной поверхности, что делает его универсальным для задач, выходящих за пределы лабораторных стен.
Ранее подобные роботы обучались выполнять такие простые задачи, как открытие дверей или подбор предметов, но управление их сложной кинематикой в динамичных условиях оставалось нерешенной проблемой. В новых исследованиях учёные сделали ставку на слияние систем визуального восприятия с управлением движением, что стало прорывом в робототехнике.
Обучение через симуляцию и методика усиленного обучения
Главной инновацией стало использование метода усиленного обучения — разновидности машинного обучения, при которой роботу даются награды за выполнение конкретных действий. Исследователи создали виртуальную среду — полноценный симулятор корта для бадминтона, в котором робот-двойник, виртуальный аналог ANYmal, учился ловить и отбивать шуткуки. В рамках тренировки виртуальный "спортсмен" совершил более 50 миллионов симуляционных попыток.
Каждая из этих симуляций разрабатывала тактику движений, учитывая такие параметры, как скорость, угол удара и траектория полёта воланчика. За каждое точное попадание или успешное направление мяча на противоположную сторону сети, системе присуждалась награда. В итоге был создан нейронный сетевой контроль, который позволил роботу адаптировать свои движения и реагировать на изменение ситуации в реальном времени.
Перенос обучения в реальный мир
После этапа виртуальных тренировок нейросеть была внедрена в физический прототип — робот ANYmal с добавленным управляемым рукавом, держащим ракетку. Механизм состоял из 18 сочленений: по три на каждой ноге и шести на руке. Для контроля движений использовалась стереокамера — два объектива, расположенные бок о бок, что позволяло системе получать глубинную информацию о положении летящих шуткуков.
Тренировки в реальности показали впечатляющие результаты: робот смог ловить шуткуки со скоростью до 12 м/с, что примерно вдвое медленнее средних аматорских чемпионов по бадминтону. Важным аспектом стало его умение адаптировать свою скорость и маршрут — он мог быстро среагировать, когда мяч находился на короткой дистанции, или, при необходимости, совершить рискованный рывок на расстояние до 2,2 метров, чтобы эффективно отбить мяч.
Координация движений и стратегия поведения
Одной из сложных задач было управление всеми 18 сочленениями — моторы каждого из них учились независимо, но в конечном итоге должны были работать синхронно. Учёные отметили, что робот самостоятельно научился возвращаться в центр корта после каждого удара, что характерно для хороших игроком-спортсменов. Более того, он начал предугадывать движения мячика, основываясь на его траектории, — умение, ранее считавшееся сложностью для робототехники.
«Контроль за взглядом робота — одна из ключевых проблем. Смотреть на мяч одновременно с движением — это балансировка, которая требует определенного интеллекта. В нашем случае робот научился находить оптимальный баланс между концентрацией и движением», — объяснил один из ведущих авторов исследования, специалист по робототехнике Юнтау Ма.
Хотя достигнутые результаты впечатляют, исследователи признают, что в системе ещё есть место для улучшений. Например, добавление возможности мониторинга позы соперника или внедрение "шеи", которая позволит роботу дольше следить за полетом мячика, сделало бы его более адаптивным и стратегичным игроком.
Перспективы и практическое применение
Искусственный интеллект и робототехника, успешно применённые в этой разработке, могут найти множество других сфер. Например, роботы, обучающиеся взаимодействию с людьми в условиях шума и хаоса, могут стать незаменимыми помощниками при ликвидации последствий стихийных бедствий — они смогут устранять обломки или доставлять медикаменты, балансируя визуальную информацию и физические действия.
Также известно, что подобные системы могут революционизировать спортивные тренировки и реабилитацию, помогая спортсменам и пациентам отрабатывать технику и реакцию. В настоящий момент исследования продолжаются, и в будущем роботы подобного типа могут стать полноценными участниками соревнований, а не только экспериментальными платформами.
Заключение
Создание робота-пса, владеющего навыками игры в бадминтон, подчеркивает прогресс в области синергии искусственного интеллекта и мехатроники. Способность учиться, приспосабливаться и демонстрировать человеческую ловкость — это не только достижение технических аспектов, но и важный шаг к интеграции роботов в общество. Уже сейчас такие разработки открывают новые возможности в исследованиях, промышленности и спорте, делая будущее всё более технологичным и удивительным.