Приветствуем вас, уважаемые единомышленники, на нашем канале "DIY Modeling", где мы оживляем мир робототехники! В предыдущих материалах мы заложили крепкий фундамент: познакомились с историей ROS, установили рабочее окружение на Windows с помощью VirtualBox и Ubuntu, а также освоили основные инструменты разработки, такие как VS Code с необходимыми расширениями. Теперь, когда наша "мастерская" готова, мы готовы перейти к самому главному – детальному погружению в архитектуру ROS 2. Мы разберем каждый аспект, каждый компонент, каждую функцию, чтобы вы не просто знали, как пользоваться ROS 2, но и понимали, как он работает "под капотом", и как вы можете использовать эти знания для создания своих собственных, по-настоящему интеллектуальных роботизированных систем. Приготовьтесь к полному, энциклопедическому путешествию в мир ROS 2!
Введение: Робототехника – наука о замене человека и ее программный двигатель
Давайте начнем с определения, которое дает нам понимание сути робототехники: "Робототехника изучает машины, которые могут заменить человека в выполнении задач, связанных с физической активностью и принятием решений". Это определение четко выделяет два фундаментальных аспекта, которые делают робота "роботом":
- Физическая активность: Робот должен обладать способностью выполнять действия, которые физически изменяют окружающую среду. Это может быть что угодно: от перемещения тяжелых грузов на складе, как в промышленных манипуляторах, до деликатного манипулирования мелкими предметами, как это делают хирургические роботы или роботы-манипуляторы на производственных линиях. Это включает в себя механику, электронику, приводы, сенсоры, которые позволяют роботу ощущать и воздействовать на мир.
- Принятие решений: Но физическая сила – это лишь часть задачи. Истинный робот должен быть "интеллектуальным". Это означает, что он должен уметь воспринимать окружающую среду (например, с помощью камер, лидаров, тактильных сенсоров), анализировать полученную информацию, планировать свои действия, адаптироваться к меняющимся условиям, избегать препятствий, выбирать наиболее подходящий объект для захвата из корзины, и даже принимать сложные решения в неопределенных ситуациях. Здесь ключевую роль играет программное обеспечение, которое кодирует этот "интеллектуальный" алгоритм поведения.
Почему разработка "с нуля" — это вызов:
Создание такого сложного робота с нуля – это задача, требующая глубоких знаний из множества дисциплин: электроника (для работы с сенсорами и приводами), механика (для проектирования корпуса, манипуляторов), сети (для связи между компонентами и удаленным управлением) и, конечно же, информатика (для всего программного обеспечения). А создание этого программного обеспечения с нуля – это поистине сложный, долгий и кропотливый процесс.
Возникновение ROS: Решение проблемы совместимости и стандартизации
За последние годы, благодаря усилиям университетов и инновационных компаний, мы наблюдаем взрывной рост в области разработки модулей и функций для автономных роботов. Однако, поначалу, эти модули часто разрабатывались с разными интерфейсами и протоколами связи, что делало их несовместимыми друг с другом. Представьте, что вы хотите использовать отличную библиотеку для компьютерного зрения от одного поставщика, а систему навигации от другого – и они просто не могут "понять" друг друга.
Именно эту проблему призван решить проект ROS (Robot Operating System). Его главная цель – создать унифицированную, стандартизированную платформу, которая позволяет разработчикам из разных команд и учреждений создавать совместимые программные модули. ROS позволяет использовать готовые, хорошо протестированные и оптимизированные сообществом компоненты, вместо того чтобы изобретать велосипед каждый раз.
Ключевые этапы развития:
- 2007 год: Основание Willow Garage, исследовательского центра, который стал колыбелью для многих инноваций в робототехнике.
- 2009 год: Выпущена первая версия ROS. Изначально он создавался для конкретного робота, но быстро вышел за рамки, став универсальным инструментом.
- 2018 год: Выпущена ROS 2. Эта версия была разработана с учетом уроков, полученных от ROS 1, и с учетом новых требований индустрии, таких как поддержка реального времени, улучшенная безопасность и более надежная сетевая коммуникация. Именно ROS 2 мы будем активно использовать в нашем курсе.
- 2021 год: Яркий пример применения ROS 2 – лунный ровер NASA VIPER, который работает под управлением ROS 2. Это демонстрирует, насколько мощным и надежным стал фреймворк.
ROS уже сегодня применяется в самых разных областях: от промышленной автоматизации и исследовательской робототехники до сервисных роботов и даже освоения космоса. И с каждым годом его возможности и сферы применения только расширяются.
Часть 1: Фундаментальные принципы ROS 2: Как работает "операционная система" для роботов
Прежде чем перейти к конкретным инструментам, давайте разберем ключевые концепции, лежащие в основе архитектуры ROS 2. Понимание этих принципов – это ключ к эффективному использованию всей системы.
1.1. Аппаратная абстракция: Единство перед многообразием
- Проблема: Роботы — это сложные устройства, состоящие из множества разнородных аппаратных компонентов: процессоров (CPU), графических ускорителей (GPU), оперативной памяти (RAM), множества сенсоров (камеры, лидары, энкодеры, инерциальные измерительные блоки - IMU) и актуаторов (моторы, сервоприводы, гидравлические системы). Создавать программное обеспечение, которое напрямую управляет каждым конкретным устройством, было бы непосильной задачей, так как пришлось бы переписывать код для каждого нового датчика или мотора.
- Решение: ROS 2, как и любая современная операционная система, предоставляет слой аппаратной абстракции. Это означает, что разработчики могут писать код, который не зависит от конкретных аппаратных особенностей. Вместо этого, они взаимодействуют с унифицированными интерфейсами, которые ROS 2 предоставляет для сенсоров, моторов и других устройств.
- Аналогия: Думайте об этом как о драйверах для вашего компьютера. Когда вы подключаете USB-клавиатуру или принтер, операционная система предоставляет стандартный способ взаимодействия с ними, независимо от того, какой именно модели клавиатура или принтер. Вам не нужно знать, как устроена электроника внутри, чтобы печатать текст. Аналогично, ROS 2 позволяет вашему программному обеспечению "говорить" с роботом на универсальном языке, а ROS 2 сам "переводит" эти команды на язык конкретного "железа", используя специальные драйверы.
- Преимущества:
Переносимость кода: Ваш программный код сможет работать на различных аппаратных платформах (разные роботы, компьютеры, микроконтроллеры), если они поддерживают ROS 2.
Упрощение разработки: Вам не придется углубляться в низкоуровневые детали каждого сенсора или мотора. Вы можете сосредоточиться на алгоритмах и логике поведения робота.
Модульность: Легкая замена или добавление новых аппаратных компонентов без необходимости переписывать основное ПО.
1.2. ROS 2: Коммуникация между процессами (Nodes)
В основе ROS 2 лежит концепция узлов (Nodes) – это отдельные, независимые программы, каждая из которых выполняет свою конкретную задачу. Например, один узел может отвечать за чтение данных с камеры, другой – за управление двигателями, третий – за планирование пути. Чтобы эти узлы могли эффективно работать вместе, ROS 2 предоставляет несколько ключевых механизмов коммуникации:
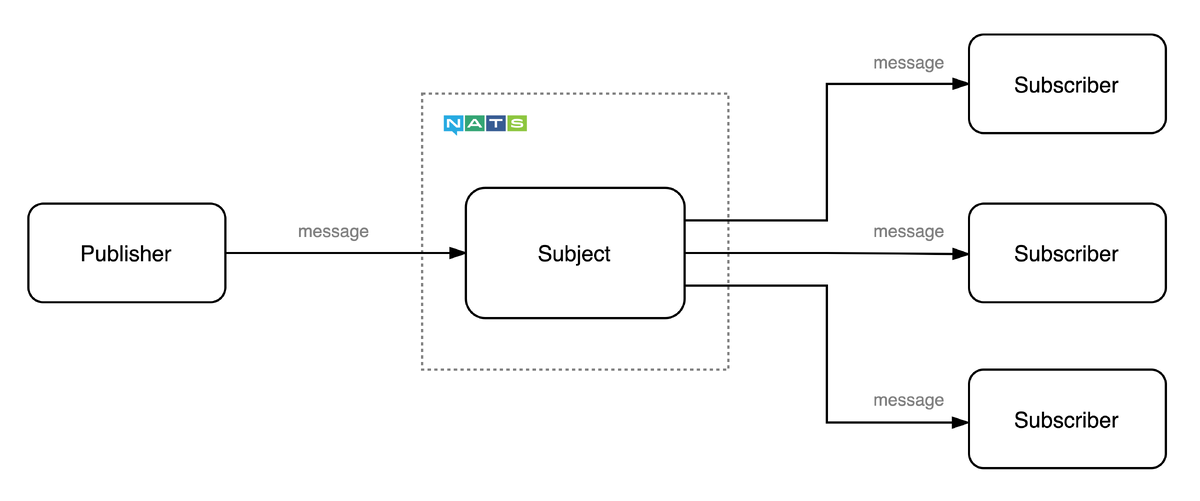
- Темы (Topics):
Тип: Асинхронная, публикация/подписка.
Принцип работы: Это самый распространенный способ обмена информацией. Узел-издатель (Publisher) "публикует" сообщения (данные) на определенную "тему" (названный канал). Другие узлы, называемые подписчиками (Subscribers), могут "подписаться" на эту тему и получать все публикуемые сообщения.
Ключевые особенности:
Асинхронность: Издатель отправляет данные и продолжает свою работу, не дожидаясь, пока подписчики их обработают.
Множественные подписчики: Один издатель может передавать данные множеству подписчиков одновременно.
Множественные издатели: Несколько узлов могут публиковать данные на одну тему, хотя для этого требуется специальная конфигурация (настройка качества обслуживания – QoS).
Слабая связанность: Издатель и подписчики не знают друг о друге напрямую. Это делает систему гибкой: можно добавлять или удалять подписчиков, не меняя издателя.
Примеры использования: Передача непрерывных потоков данных, таких как:
Данные с камеры (изображения, глубина).
Показания сенсоров (лидар, IMU, одометрия).
Команды управления (скорость, поворот).
Состояние робота.
Визуализация: Представьте это как радиовещание: станция (издатель) передает сигнал (сообщение) по определенной частоте (тема), а все, кто настроен на эту частоту (подписчики), могут слушать.
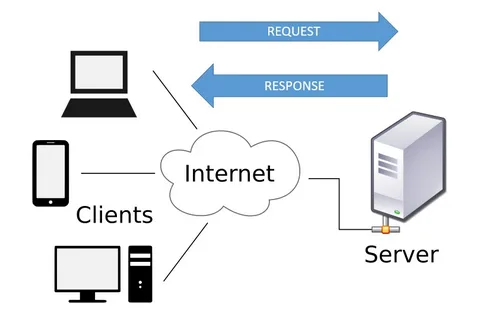
- Сервисы (Services):
Тип: Синхронная коммуникация, запрос/ответ.
Принцип работы: Сервисы используются, когда нужно выполнить конкретное, одномоментное действие и получить немедленный результат. Один узел (клиент) отправляет запрос (request) другому узлу (серверу), сервер выполняет действие и отправляет ответ (response). Важно, что клиент ожидает этого ответа, прежде чем продолжить свою работу.
Сценарии использования: Когда необходимо получить конкретное значение или выполнить команду, которая должна быть завершена немедленно:
Запросить текущие координаты робота.
Попросить робота выполнить однократное действие, например, "перейти в режим калибровки".
Получить параметры системы.
Пример: Робот-манипулятор получает команду "захватить объект". Клиент (например, программа верхнего уровня) отправляет запрос на выполнение этой задачи серверу (узел управления манипулятором). Сервер выполняет захват и возвращает клиенту результат: "успех" или "не удалось".
- Действия (Actions):
Тип: Асинхронная коммуникация с обратной связью и возможностью отмены.
Принцип работы: Этот механизм предназначен для выполнения задач, которые могут занимать длительное время и требуют регулярной обратной связи (feedback) о прогрессе. Клиент отправляет цель (goal) серверу. Сервер начинает выполнение, периодически посылая клиенту информацию о прогрессе (feedback), а затем, по завершении, отправляет результат (result). Важно, что клиент может также отправить команду отмены (cancel), если задача больше не актуальна.
Сценарии использования: Длительные, сложные задачи, где важно отслеживать выполнение:
Навигация робота к заданной точке (клиент отправляет координаты, сервер сообщает о достижении или препятствиях).
Сложные манипуляции с робо-манипулятором (например, сборка детали).
Длительные вычисления или переходы в безопасное состояние.
Пример: Клиент дает роботу команду: "переместиться в точку X с погрешностью не более 5 см". Робот начинает движение, постоянно отправляет обратную связь о текущем расстоянии до цели, а когда цель достигнута (или возникла проблема), возвращает финальный результат. Если цель изменилась, клиент может отправить команду отмены.
2.3. ROS 2 Middleware (RMW) и DDS – Основа надежности и скорости
- ROS 2 Middleware (RMW): Это ключевой уровень абстракции, который позволяет ROS 2 работать с различными DDS (Data Distribution Service) реализациями. RMW является своего рода "переходником" между стандартными API ROS 2 и низкоуровневыми протоколами DDS.
- DDS: DDS – это не просто протокол, а целый стандарт промежуточного ПО (middleware), разработанный для высокопроизводительных, надежных и безопасных систем реального времени. Он широко используется в критически важных отраслях, таких как аэрокосмическая промышленность, военная техника, финансы, и там, где требуется гарантированная доставка данных даже в условиях ненадежных сетей.
Основные преимущества DDS:
Обнаружение сервисов и данных: DDS автоматически находит узлы и данные в сети.
Контроль качества обслуживания (QoS - Quality of Service): Позволяет тонко настроить параметры доставки сообщений:
Надежность (Reliability): Гарантированная доставка (reliable) или доставка "как есть" (best effort).
Насыщенность (Durability): Будут ли новые подписчики получать старые сообщения.
Срок жизни (Liveliness): Как узлы сигнализируют о своей активности.
Безопасность: Поддержка шифрования и аутентификации для защиты данных.
Реализации DDS: ROS 2 может использовать различные DDS реализации (Cyclone DDS, Fast DDS, Connext DDS), что дает разработчикам возможность выбора оптимальной конфигурации. Fast DDS является реализацией по умолчанию и хорошо подходит для большинства задач. - rcl (ROS 2 Client Library): Это набор библиотек, построенных поверх RMW, которые предоставляют унифицированный API для разработчиков. Вы можете писать свой код на:
C++ (rclcpp): Для максимальной производительности и низкоуровневого контроля.
Python (rclpy): Для быстрой разработки, прототипирования и скриптов.
Java (rcljava): Для интеграции с Java-приложениями.
Часть 3: Организация кода: Пакеты и Workspace – Ваш производственный цикл
Любой сложный проект нуждается в организации, и робототехника не исключение. ROS 2 использует структуру пакетов (Packages) и рабочего пространства (Workspace) для управления кодом и зависимостями.
- Что такое пакет?
Пакет – это базовый кирпичик в экосистеме ROS 2. Представьте его как отдельный модуль, который реализует определенную функциональность. Внутри пакета находятся:
Исходный код: Сами программы (узлы), написанные на C++, Python или других языках, которые выполняют задачи робота.
Библиотеки: Дополнительный код, который может быть использован другими пакетами.
Файлы данных: Конфигурационные файлы (например, параметры запуска узлов), файлы описания робота (URDF/XACRO), данные сенсоров, модели и т.д.
Скрипты сборки: Инструкции для системы сборки (например, CMakeLists.txt для C++ или setup.py для Python), описывающие, как скомпилировать код и построить пакет.
Манифест пакета (package.xml): Это "паспорт" пакета. Он содержит важную метаинформацию: имя пакета, описание, версию, авторов, а главное – зависимости от других пакетов. Это позволяет системе сборки правильно разрешать связи между различными частями вашего проекта. - Workspace: Ваша цифровая мастерская
Назначение: Рабочая область (workspace) – это директория, где вы будете хранить, разрабатывать и собирать все свои ROS 2 проекты. Это ваша личная среда разработки, куда вы будете добавлять свои наработки.
Структура Workspace: Типичная структура выглядит следующим образом:
src: В этой папке вы создаете исходные коды ваших пакетов. Каждая поддиректория здесь – это отдельный ROS 2 пакет.
build: Сюда colcon (инструмент сборки) помещает промежуточные файлы, необходимые для компиляции. Вы обычно не трогаете эту папку.
install: Здесь colcon устанавливает (собирает) ваши пакеты, делая их доступными для использования. И именно эта папка будет "устанавливать" вашу рабочую среду.
log: Здесь сохраняются логи всех операций colcon (сборка, тестирование). Это очень полезно для отладки.
Underlay и Overlay: Искусство совмещения
Underlay: Это "базовый слой", который состоит из системных пакетов ROS 2, установленных ранее (например, с помощью apt install ros-humble-desktop-full). Он содержит всю основную функциональность ROS 2.
Overlay: Это "верхний слой" – ваша рабочая область (workspace/install). Все, что вы соберете в install, автоматически становится доступным поверх underlay. Если вы создадите пакет с тем же именем, что и в underlay, ваша версия из overlay будет иметь приоритет. Это позволяет вам легко модифицировать или расширять существующие пакеты, не затрагивая основную установку ROS 2. - Colcon: Ваш инструмент сборки
Что это: colcon – это утилита командной строки, которая является стандартом для сборки ROS 2 проектов. Она позволяет автоматизировать процесс компиляции кода, установки зависимостей и создания исполняемых файлов.
Основные команды:
colcon build: Собирает все пакеты в вашем src каталоге.
colcon test: Запускает тесты для ваших пакетов (если они написаны).
colcon install: Устанавливает собранные пакеты в директорию install вашего workspace.
Настройка автодополнения: Чтобы команды colcon было удобнее использовать в терминале (например, чтобы они сами дополнялись по нажатию Tab), нужно выполнить команду echo "source /usr/share/colcon_common_extensions/hook/colcon-argcomplete.bash" >> ~/.bashrc и затем source ~/.bashrc. Это сделает вашу работу гораздо быстрее и проще.
Заключение: Строим будущее робототехники, кирпичик за кирпичиком
Понимая архитектуру ROS 2 – эти слои абстракции, механизмы коммуникации и структуру организации кода – вы получаете мощный набор инструментов для создания самых амбициозных роботизированных проектов. От низкоуровневого управления двигателями до высокоуровневого принятия решений и взаимодействия с миром – ROS 2 предоставляет гибкую и масштабируемую платформу для реализации ваших идей.
В следующих частях нашего курса мы перейдем от теории к практике, применяя эти знания для создания реальных приложений, которые заставят ваших роботов двигаться, видеть и мыслить!