В работе представлены разработка и исследование динамических характеристик асинхронного электропривода подъемной машины с векторной системой управления на основе релейного регулятора. Разработана имитационная модель в программном обеспечении REPEAT, позволяющая анализировать переходные процессы в системе. Исследовано влияние коэффициентов пропорционально-интегрального регулятора скорости на динамические характеристики электропривода. Проанализированы особенности работы релейного регулятора, включая влияние зоны нечувствительности на переходные процессы. Определены оптимальные параметры настройки системы, обеспечивающие высокое качество управления. Полученные результаты могут быть использованы для повышения эффективности работы подъемных установок.
Введение
Цель работы - исследование динамических характеристик асинхронного электропривода подъемной машины с векторной системой управления с релейным регулятором. Для достижения поставленной цели требуется разработать модель асинхронного электропривода с релейным регулятором тока и провести моделирование и анализ его переходных процессов.
Имитационная модель
Имитационная модель разработана в среде ПО REPEAT. Для исследования электропривода с векторным управлением использован асинхронный двигатель типа АДЧР-1250-0,66-6У1.
При моделировании принимаются следующие допущения:
- не учитываются потери в стали
- симметричный режим работы
- пренебрегается насыщение магнитной цепи
Модель реализована в ПО REPEAT с использованием библиотек "Автоматика" и "Электроника". Ее структура включает:
1. асинхронный двигатель с короткозамкнутым ротором;
2. силовую часть: трёхфазный источник напряжения, мостовой выпрямитель и инвертор на идеальных ключах;
3. систему векторного управления, содержащую:
- регуляторы скорости и потокосцепления;
- блоки прямого/обратного преобразований Кларка-Парка;
- алгоритм косвенной оценки параметров двигателя;
- модуль определения угла положения двухфазной системы координат;
- блок задания частоты инвертора.
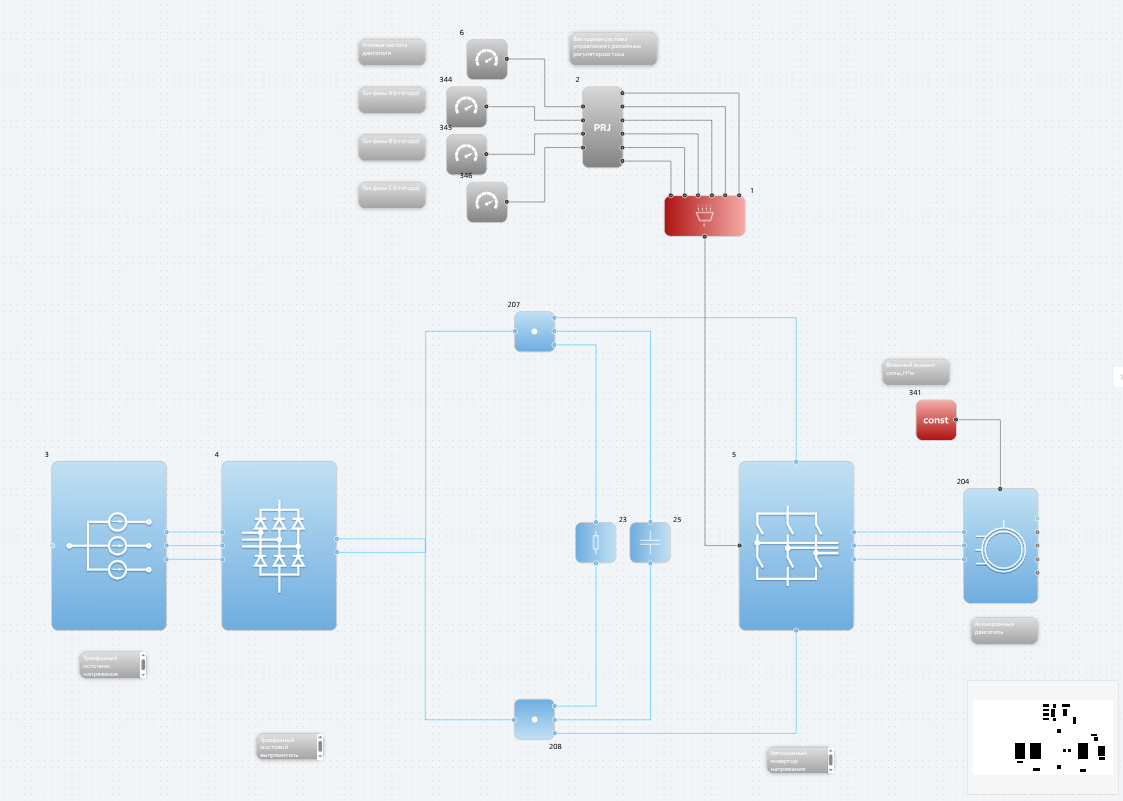
На рисунке 1 изображена модель асинхронной машины с векторной системой управления на основе инвертора с релейным управлением. Номинальное линейное напряжение источника выбрана равной 660В. Скорость и настройки регуляторов задаются в блоке системы управления, которая создана с помощью внешнего проекта (рисунок 2). Нагрузка для на двигатель в виде момента задается в виде блока константы, т.к для подъемной машины нагрузка является постоянной величиной на время переходных процессов.
Шаг моделирования равна 0.1 мс. Время моделирования 15 с.
На рисунке 3 изображены динамические характеристики электропривода с векторным управлением на основе инвертора с релейным управлением.
Исследование переходных процессов в частотно-регулируемом электроприводе на компьютерной модели
В разделе представлены результаты моделирования переходных процессов частотно-регулируемого электропривода. Определены коэффициенты передаточных функций регулятора скорости и релейного регулятора тока, обеспечивающие оптимальный переходный процесс при пуске. Критерии оптимальности включают заданное быстродействие и ограничение перерегулирования скорости и момента двигателя до 5%.
На рисунках 4 – 10 продемонстрированы результаты пуска привода с векторным управлением на основе инвертора с релейным управлением угловую скорость 80 1/с при различных значениях интегрального коэффициента регулятора скорости и постоянном значении пропорционального коэффициента регулятора скорости, равном 336, при приложении нагрузки, равной 10000 Н·м, в начале пуска.
На данных рисунках изображены два графика, где
- Верхний график отображает изменение угловой скорости двигателя (рад/с);
- Нижний график показывает динамику момента двигателя (Н·м).
Анализ полученных графиков позволяет сделать вывод, что уменьшение величины интегрального коэффициента ведет к уменьшению колебаний. При интегральном коэффициенте регулятора скорости, равном 1312, обеспечивается оптимальный переходный процесс. При дальнейшем уменьшении коэффициента угловая скорость двигателя уменьшается по сравнению с заданием.
На рисунках 11 – 17 продемонстрированы результаты пуска привода с векторным управлением на основе инвертора с релейным управлением на номинальную (максимальную) угловую скорость 80 1/с при различных значениях пропорционального коэффициента регулятора скорости и постоянном значении его интегрального коэффициента, равном 1312, при приложении нагрузки равной 10000 Н·м, в начале пуска, где
- Верхний график отображает изменение угловой скорости двигателя (рад/с);
- Нижний график показывает динамику момента двигателя (Н·м).
Из анализа полученных графиков делается вывод, что при пропорциональном коэффициенте регулятора скорости, равном 1680 обеспечивается оптимальный переходный процесс.
На основании выполненных исследований выполнена настройка регулятора скорости. Оптимальный переходный процесс обеспечивается при параметрах регулятора скорости, равных: для пропорциональной части – 1680, для интегральной части – 1312.
На следующем этапе работы было проанализировано влияние ширины зоны нечувствительности релейного регулятора тока на характер переходных процессов в электроприводе. Результаты исследования представлены на рисунках 18–24, где:
- Верхний график отображает изменение угловой скорости двигателя (рад/с);
- Нижний график показывает динамику момента двигателя (Н·м).
Эксперименты проводились при разгоне привода до номинальной угловой скорости 80 рад/с под нагрузкой 10 000 Н·м, с варьированием параметра зоны нечувствительности регулятора.
Анализ графиков показал, что уменьшение зоны нечувствительности до 20 А позволяет снизить амплитуду высокочастотных колебаний момента и повысить точность регулирования тока. На основании этого для системы управления была выбрана зона нечувствительности 20 А. Дальнейшее уменьшение зоны нечувствительности не приводит к значительному снижению колебаний момента, однако увеличивает частоту коммутации транзисторов частотного преобразователя. Это вызывает рост потерь энергии, снижение КПД системы и может сократить срок службы силовых ключей из-за перегрева и повышенной нагрузки.
Заключение
1. На основании выполненных исследований выполнена настройка регулятора скорости. Оптимальный переходный процесс обеспечивается при параметрах регулятора скорости, равных: для пропорциональной части – 1680, для интегральной части – 1312.
2. Из анализа графиков следует, что при уменьшении зоны нечувствительности до 20 А уменьшается амплитуда высокочастотных колебаний момента и увеличивается точность регулирования тока. При меньших значениях зоны нечувствительности амплитуда колебаний момента практически не уменьшаются, однако увеличивается частота коммутации транзисторов преобразователя частоты, что приводит к дополнительным потерям в преобразователе.
3. Выполнено исследование динамических характеристик асинхронного электропривода подъемной машины с векторной системой управления с релейным регулятором.