В условиях стремительного развития автоматизации технологических процессов датчики положения объектов являются критически важными элементами, играющими ключевую роль в обеспечении необходимой точности, надежности и эффективности систем управления. В статье рассмотрены варианты реализации датчиков линейного положения, использующие разные принципы преобразования линейного положения в полезный сигнал (код), в том числе применение датчика углового положения, разработанного в Зеленоградском нанотехнологическом центре.
В системах управления используются датчики углового и линейного положения двух типов: инкрементальные и абсолютные.
Инкрементальные датчики положения позволяют определять текущее положение методом отсчета количества шагов перемещения относительно положения, при котором было подано напряжение питания или выполнена инициализация.
После подачи напряжения питания контроллер инкрементального датчика положения выдает сигнал (код), являющийся кодом начального положения, от которого будет осуществляться отсчет перемещения. При последующем перемещении отсчет формируется парой импульсов А и Б. При перемещении вперед первым формируется импульс А, при перемещении назад первым формируется импульс Б, как показано на рис. 1.
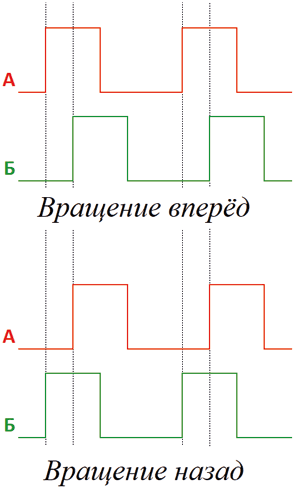
Рис. 1. Входные сигналы контроллера инкрементального датчика
Пара импульсов управляет реверсивным счетчиком контроллера, на выходе которого формируется сигнал (код), соответствующий количеству шагов перемещения относительно начального положения. Формирование импульсов может осуществляться как механическим воздействием на контакты, так и бесконтактными методами, путем модуляции светового потока на фоточувствительные элементы или магнитного поля на магниточувствительные элементы.
Таким образом, для отсчета абсолютного положения по шкале перемещений необходимо после подачи питания принудительно устанавливать датчик в положение, соответствующее началу шкалы отсчета перемещений, и выполнить его инициализацию. После чего все последующие положения будут отсчитываться от начала шкалы перемещения.
Абсолютные датчики после подачи напряжения питания сразу выдают код, соответствующий текущему положению на шкале перемещений. После подачи питания контроллер абсолютного датчика определяет свое положение относительно начала шкалы перемещения по кодовой линейке и выдает сигнал (код), пропорциональный положению. При каждом новом положении датчик будет заново определять свое положение по кодовой линейке и выдавать соответствующий код положения.
По принципу действия абсолютные датчики положения могут быть потенциометрическими, оптическими и магнитными.
Наиболее простой абсолютный датчик положения – потенциометрический. В нем используется линейка из резистивного материала (обычно выполненная в виде длинной дорожки) длиной L и подвижного контакта (или движка), который скользит по этой линейке. Источник напряжения Uпит, питающий датчик, подключается к концам резистивной линейки (рис. 2).
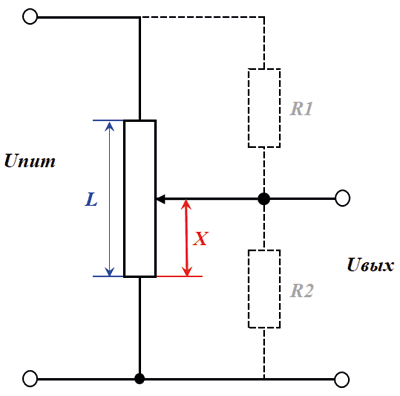
Рис. 2. Схема включения потенциометрического датчика
Если обозначить общее сопротивление резистивной линейки датчика через R, а сопротивления участков линейки до и после места положения подвижного контакта как R1 и R2, то схему включения датчика можно представить как последовательное соединение резисторов: R1 + R2 = R. При этом ток источника питания, протекающий через резисторы R1 и R2, приведет к падению напряжений U1 и U2, соотношение которых будет зависеть от соотношений длин участков резистивной рейки до и после места положения подвижного контакта. Если выходное напряжение снимать с участка R2, то падение напряжения на нем будет меняться в диапазоне от 0 до Uпит пропорционально расстоянию Х (до положения подвижного контакта на резистивной рейке от начала отсчета).
Оптические датчики линейного перемещения – это устройства, которые используют светочувствительные элементы для определения текущего положения объекта. В качестве примера можно рассмотреть оптический датчик линейного перемещения, основанный на оптическом считывании бинарного кода с ячеек линейки (рис. 3).
Рис. 3. Схема устройства оптического датчика
В устройстве используется источник света, например светодиод (LED), который создает поток света и направляет его на кодовую линейку. Линейка может представлять собой многодорожечную маску с ячейками (отверстиями), расположенную между источником света и светочувствительным элементом, либо поверхность с ячейками, отражающими световой поток от источника света на фотоприемник. Количество дорожек определяет разрядность преобразования. Активная ячейка дорожки (пропускающая или отражающая световой поток) соответствует коду логической 1, пассивная – логическому 0. Эти бинарные значения расположены последовательно в определенном порядке по всей длине линейки. Каждая дорожка считывается отдельным светочувствительным элементом фотоприемника и формирует один бит в коде.
После подачи электропитания фотоприемники считывают значение кода, в ячейке соответствующее текущему положению фотоприемника относительно маски, и выдают на контроллер соответствующий логический сигнал. При изменении положения фотоприемник перемещается относительно маски, и каждое последующее положение будет соответствовать новому значению бинарного кода линейки. Каждое последующее значение кода линейки соответствует перемещению на один шаг. Размер шага определяется длиной линейки и разрядностью преобразования по формуле:
H = L • 2n,
где L – длина линейки,
n – разрядность преобразования.
Шаг является дискретной единицей отсчета величины перемещения. Контроллер преобразует бинарный код текущего положения в сигнал выходного интерфейса.
Магнитные датчики линейного перемещения работают на основе взаимодействия магниточувствительных элементов с магнитным полями кодовой рейки (рис. 4). Магнитное поле кодовой рейки формируется двумя многополюсными дорожками: главной и нониусной. Магниточувствительная сенсорная система состоит из двух пар датчиков, использующих эффект Холла (или аналогичных). Каждая пара считывает магнитное поле со своей дорожки. Количество пар полюсов на основной дорожке выбирается, исходя из необходимой длины перемещения, а на нониусной количество полюсов должно быть на одну пару меньше, чтобы создавать фазовый сдвиг на один период между полями. Для совмещения положения на рейке первых и последних полюсных пар расстояние между полюсами (шаг) на нониусной дорожке больше, чем на основной.
Рис. 4. Принцип работы магнитного датчика (увеличить изображение)
Каждая пара датчиков считывает текущее угловое значение синусоиды магнитного поля своей дорожки и передает двухканальному контроллеру. В начальном положении шкалы перемещения L фаза магнитного поля у обеих дорожек совпадает. На каждом новом положении, по мере перемещения сенсорной системы, будет изменяться фазовый сдвиг сигналов магнитных полей, поскольку в нониусном канале фаза сигнала будет отставать от фазы основного канала. Контроллер преобразует фазовый сдвиг сигналов между каналами в код, пропорциональный положению X.
Перечислим особенности датчиков разных типов.
Потенциометрические:
- самые старые и самые дешевые датчики, широко применялись в устройствах с неинтенсивной степенью перемещения;
- срок эксплуатации датчиков зависел от износа поверхности рейки при взаимодействии с подвижным контактом;
- для обеспечения необходимой долговечности изделия датчики разрабатывались как легкозаменяемый элемент конструкции.
Оптические:
- наиболее широко применяемые датчики с высоким быстродействием;
- дискретность обеспечивается разрядностью кода на линейке;
- дискретность ограничена минимальным шагом кодовой ячейки на линейке, уменьшение шага ограничено дифракцией светового потока;
- стоимость невелика, но возрастает с увеличением разрядности преобразования.
Магнитные:
- отличаются малыми габаритами и высокой надежностью. Внешние магнитные поля не оказывают влияния на устойчивость работы, поскольку для преобразования магнитных полей кодовой рейки актуальна не их амплитуда, а разность фаз;
- дискретность обеспечивается разрядностью преобразования. Ширина рейки и размеры магнитной системы не зависят от необходимой дискретности преобразования;
- быстродействие датчика зависит от разрядности преобразования;
- стоимость магнитных датчиков зависит от объемов их производства, поскольку для намагничивания многополюсной рейки каждого типоразмера необходимо изготовление дорогостоящей оснастки.
Вывод: современные оптические и магнитные датчики линейного перемещения успешно выполняют свои задачи, но непреодолимым ограничением их использования является длина контролируемых перемещений. Увеличение длины перемещения связано с увеличением длины кодовой рейки, разрядности преобразования, а следовательно, и их стоимости.
В качестве альтернативного варианта может быть использована технология преобразования линейного перемещения в угловое с последующим измерением углового положения мерного колеса многооборотным энкодером (датчиком углового положения).
В компании «Зеленоградский нанотехнологический центр» (АО «ЗНТЦ») разработана и серийно выпускается микросхема К1382НМ025 (рис. 5) для абсолютного магнитного энкодера, позволяющая использовать многооборотный режим работы.Микросхема имеет встроенную сенсорную систему на магниточувствительных элементах с эффектом Холла, которая позволяет определять угловое положение магнитного поля цилиндрического диаметрально намагниченного магнита диаметром не менее 6 мм, установленного на торце вала перед микросхемой с зазором 0,5…2 мм. Конструкция энкодера с использованием микросхемы К1382НМ025 показана на рис. 6.
Рис. 5. Внешний вид микросхемы
Рис. 6. Конструкция датчика углового положения
Основные параметры энкодера:
- 12-разрядный АЦП позволяет выполнять 4096 угловых отсчетов за один оборот с дискретностью 0,088 градуса;
- встроенный 10-разрядный реверсивный программируемый счетчик оборотов позволяет реализовать многооборотный режим работы (до 1024 оборотов);
- цифровой последовательный интерфейс SPI/SSI при частоте тактирования 2 МГц обеспечивает считывание углового кода со скоростью вращения до 1580 об/мин.
При использовании такого энкодера появляется возможность контролировать линейное положение на гораздо большей длине, чем при использовании кодовой рейки, и с очень высокой точностью. Рассмотрим варианты применения датчика линейного положения с использованием данной микросхемы энкодера.
Электропривод линейного положения каретки на стреле башенного подъемного крана подключен к системе управления. Система управления обеспечивает плавный разгон и замедление перемещения каретки во избежание раскачивания подвешенного груза при управлении перемещением каретки крановщиком (рис. 7).
Рис. 7. Применение датчика линейного перемещения с использованием энкодера
Динамическое управление скоростью перемещения каретки позволяет значительно экономить время на перемещение груза при длине стрелы более 30 м. При этом особо критическими участками являются начало и конец стрелы, для которых начало замедления перемещения и разрешенная скорость перемещения должны автоматически рассчитываться контроллером системы управления, исходя из оставшегося расстояния до концевого упора, которое может определяться датчиком линейного положения.
Кроме того, при перемещении каретки в направлении на или от крановщика последний не имеет возможности оценивать визуально местонахождение каретки на стреле крана. Информация от датчика линейного положения может обрабатываться контроллером и отображаться на дисплее рабочего места крановщика. При использовании мерного шкива энкодера диаметром 400 мм можно контролировать линейное положение каретки на стреле башенного подъемного крана с дискретностью до 0,3 мм.
При оценке состояния покрытия автомобильных дорог и взлетно-посадочных полос аэропортов места появления неровностей можно фиксировать мерным колесом энкодера (при диаметре колеса 650 мм дистанция может составлять до 2 км с дискретностью до 0,5 мм).
При эксплуатации подъемных механизмов, например скоростных лифтов, требуется управлять скоростью перемещения кабины, чтобы обеспечить плавную остановку на выбранном этаже. Для этого необходима система динамического управления электродвигателем подъемного привода на основании анализа положения кабины относительно заданного этажа. В случае применения энкодера для определения положения лифта в многоэтажном доме, может быть обеспечена точность позиционирования с дискретностью до 0,38 мм (без учета растяжения троса) при использовании мерного шкива диаметром 500 мм. Кроме того, выходной сигнал (код) энкодера можно использовать для отображения текущего положения лифта в лифтовых холлах.
Глубину скважины при проведении буровых работ, или глубину погружения подводного аппарата определяют по меткам на тросе лебедки. В случае применения углового энкодера с мерным шкивом диаметром 800 мм можно измерять глубины до 2,5 км с дискретностью до 0,6 мм.
Дискретность позиционирования s (step) и максимальная длина перемещения L будут определяться диаметром мерного колеса (шкива) D с учетом многооборотного режима работы микросхемы (до 1024 об.) и могут быть рассчитаны по формулам:
Микросхема К1382НМ025 выпускается в АО «ЗНТЦ» серийно.
Статья опубликована в журнале «ИСУП»