В статье: об инновационном походе к проектированию и изготовлению подвижных манипуляторов
Традиционно роботы, копирующие животных, делаются либо из мягких материалов, обтянутых вокруг жесткого каркаса (роботы-рыбки, роботы-змеи), либо на базе жестких материалов и шарниров, имитирующих суставы животных (большинство роботов-андроидов и знаменитые роботы-собаки, роботы-мулы и т.п.).
Использование аддитивных технологий позволило отойти от этого правила.
Новый робот, внешне копирующий слона, может выполнять самые разные задачи: он может нежно сорвать цветок хоботом или нанести сильный удар ногой по жёсткому шару боулинга. Но и нога и хобот сделаны из одного материала.



Это достигнуто благодаря революционному подходу к дизайну. Особенность дизайна не в особенностях материала, а в различных решетчатых структурах, полученных при помощи 3D-печати.
Робот был создан профессором Джози Хьюз и её командой в лаборатории CREATE, входящей в состав Института машиностроения Федеральной политехнической школы Лозанны (EPFL) в Швейцарии.
Вместо использования разных материалов для хобота и ног, создатели робота использовали один материал, напечатанный в виде решетчатых структур различной жесткости. Для проектирования робота были разработаны два математических метода - «регулирование топологии» (TR) и «программирование суперпозиции» (SP).
«Регулирование топологии» (TR) позволяет постепенно смешивать две разные формы решётки для создания деталей, которые переходят от мягкого состояния к жёсткому, «программирование суперпозиции» (SP), позволяет складывать или поворачивать эти решёточные структуры, чтобы контролировать прочность и гибкость полученной структуры в определённых направлениях.
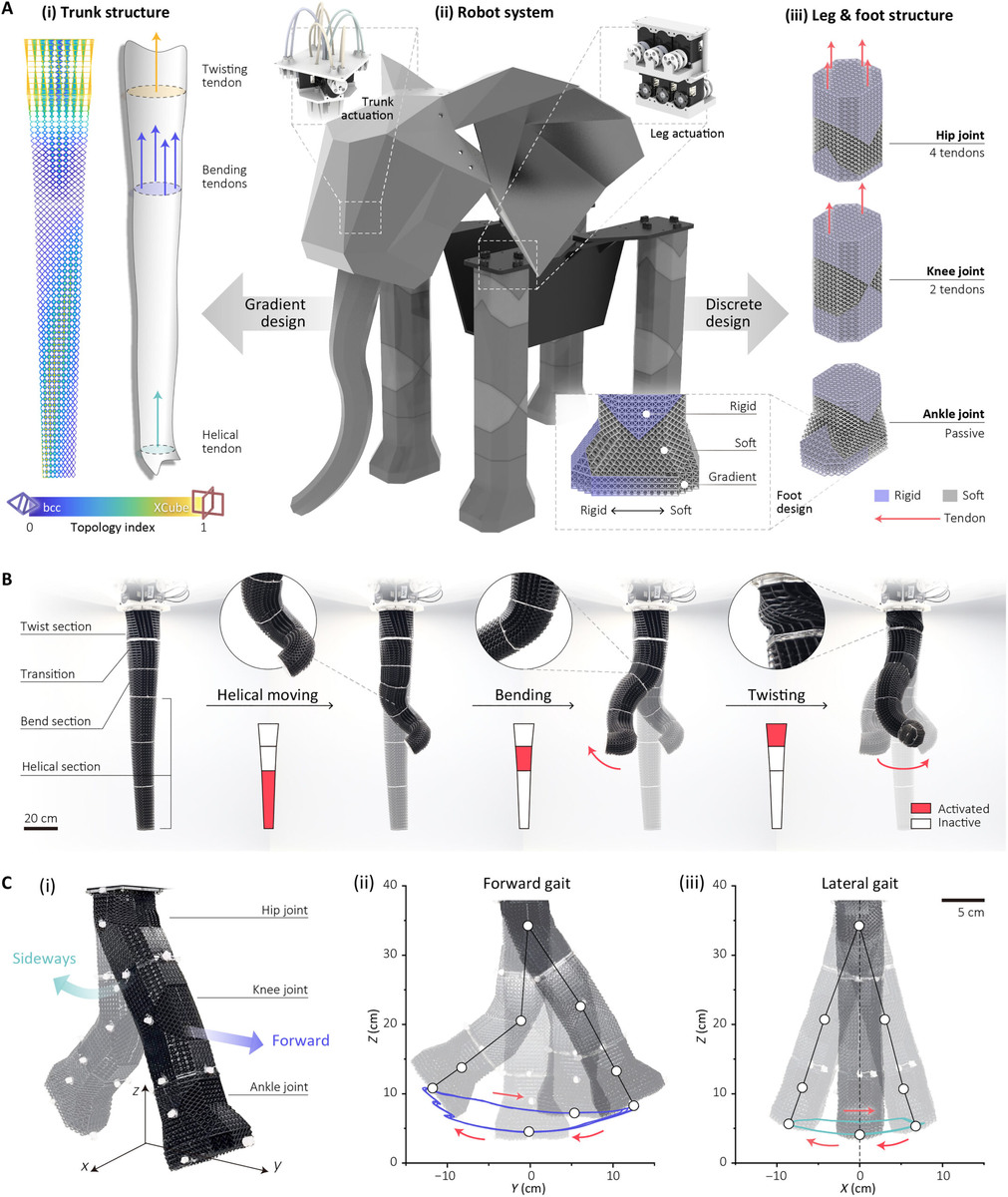
Для хобота использованы структуры, которые позволяют ему сгибаться, скручиваться и закручиваться. Хобот состоит из решёток, которые медленно меняют форму по всей длине ствола. Это позволяет ему захватывать предметы, например, цветы, не повреждая их. Ствол разделён на три части - скручивающейся, изгибающейся и спиралевидной. Они работают вместе, используя всего четыре двигателя и несколько тяг-«сухожилий».
«Такой подход обеспечивает непрерывное пространственное смешивание профилей жёсткости и позволяет создавать бесконечное количество смешанных элементарных ячеек. Он особенно хорошо подходит для воспроизведения структуры мышечных органов, таких как хобот слона», — говорит один из создателей робота-слона.
Ноги робота используют структуры, имитирующие работу прочных суставов и костей. Эти суставы имеют одну или две степени свободы, что позволяет роботу ходить, сохранять равновесие и даже играть с шаром для боулинга. Некоторые части ног жёсткие и несущие, в то время как другие более мягкие и податливые, как настоящие ноги слона.
Каждая часть робота предназначена для выполнения определённого движения или задачи - ступни спереди более жёсткие и принимают основной вес робота, а сзади более мягкие, как подушечки на пятках у настоящих слонов.
Этот подход позволил имитировать различные суставы – скользящий плоский сустав в стопе, сустав с одной степенью свободы в колене, суставы с двумя степенями свободы.
Такой подход позволяет упростить проектирование и изготовления бионических роботов, имитирующих движение живых существ. Робот управляется при помощи небольшого количества тяг-«сухожилий», при этом все двигатели располагаются вне конечностей – внутри «тела» слона, что позволяет ему передвигаться в воде «в брод».
Естественно, такие решетчатые структуры можно создавать только с использованием аддитивных технологий. Конкретно этот робот-слон напечатан из гибкой фотополимерной смолы на 3D-принтере с небольшой областью печати - хорошо видны склейки между напечатанными секциями. Но в таких конструкциях могут применяться и другие материалы, и технологии – например, термопластичный полиуретан (TPU) в виде филамента (нити для FDM-принтеров) или порошка (для лазерного спекания).
Не следует думать, что эти структуры могут быть использованы только в бионическом роботостроении – вполне возможно создание более функциональных протезов для людей, гибкие захваты для роботов-манипуляторов для работы с хрупкими предметами (например, почтовые посылки, или багаж пассажиров.
Вопрос «непрактичности» решетчатых структур легко решается обтягиванием конструкций искусственной «кожей», которая защитит решетки от загрязнения и внешних воздействий. В полые решетчатые структуры могут быть легко вмонтированы тензодатчики для обратной связи.
Перспективы у такой технологии огромные, и кто знает, может уже через пару лет мы увидим новое поколение протезов, более функциональных, чем современные.