Приветствуем снова, друзья! В прошлый раз мы подготовили операционную систему для наших экспериментов – Ubuntu 22.04 LTS в VirtualBox, с установленным ROS 2 Humble. Но для эффективной разработки нам нужен мощный и удобный инструмент – современная среда разработки. Сегодня мы подробно разберем, как установить и настроить Visual Studio Code (VS Code), один из самых популярных и функциональных редакторов кода, который отлично подходит для работы с ROS. Мы пройдем весь путь от скачивания до настройки для компиляции ваших проектов.
Часть 1: Установка Visual Studio Code – Ваш новый лучший друг в разработке
Visual Studio Code – это мощный, бесплатный и кроссплатформенный редактор кода, который поддерживает огромное количество языков программирования и имеет богатую экосистему расширений, включая те, что специально созданы для ROS.
- Скачивание VS Code для Linux (Ubuntu):
Как и в случае с установкой Ubuntu в VirtualBox, нам понадобится сам VS Code. Мы будем устанавливать его прямо в нашу виртуальную машину Ubuntu.
В используемой нами сборке Ubuntu уже есть браузер, поэтому скачать VS Code мы можем непосредственно с сайта: https://code.visualstudio.com/download (скачиваем расширение .deb) - Установка VS Code из скачанного пакета:
После того как файл скачан мы можем установить его как через терминал, так и из файла.
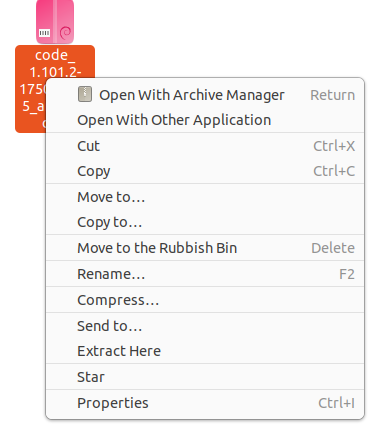
Последовательность:
- Open With Other Application
- Software Install
2. Запуск Visual Studio Code:
После успешной установки вы можете найти VS Code в меню приложений Ubuntu и запустить.
Часть 2: Расширяем возможности: Установка необходимых расширений
Чтобы VS Code стал полноценным помощником для разработки на C++, Python, работы с XML, CMake и, конечно же, ROS, нам нужно установить несколько ключевых расширений.
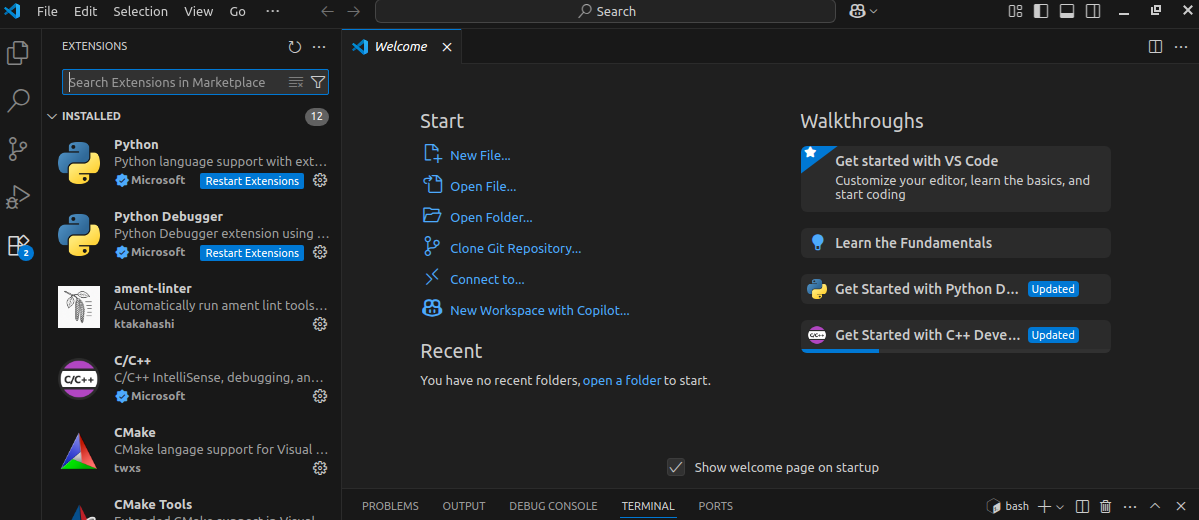
- Открытие окна расширений в VS Code:
На боковой панели VS Code найдите иконку с четырьмя квадратиками (Extensions). Также можно нажать Ctrl+Shift+X.
В строке поиска вверху окна вводите названия расширений и нажимайте кнопку "Install". - Установка расширений:
Для C++: Нам понадобится поддержка компиляции, отладки и подсветки синтаксиса для C++.
В строке поиска введите C++ и найдите расширение от Microsoft. Нажмите "Install".
Для Python: Аналогично, для разработки на Python.
В строке расширений введите Python и найдите расширение от Microsoft. Нажмите "Install".
Для XML: Полезно для работы с конфигурационными файлами и некоторыми форматами данных в робототехнике.
В строке поиска введите XML и найдите расширение "XML Language Support by Red Hat". Нажмите "Install".
Для CMake: Это система сборки, которая часто используется вместе с ROS для проектов на C++.
В строке поиска введите CMake и найдите расширение "CMake Tools" от Microsoft. Нажмите "Install".
Для ROS: Существуют специализированные расширения, которые облегчают работу с ROS-проектами, предоставляя команды для создания пакетов, запуска узлов и т.д.
В строке поиска введите ROS и найдите расширение "ROS" от Microsoft. Нажмите "Install".
Часть 3: Настройка VS Code и установка дополнительных инструментов для ROS
Теперь, когда наша основная среда готова, установим несколько полезных инструментов и настроим автодополнение для Colcon.
- Установка полезных пакетов ROS 2 (Humble):
В терминале вашей виртуальной машины Ubuntu выполните следующие команды для установки пакетов, которые часто используются при работе с ROS. Они понадобятся для симуляции, управления и отладки.
Обновим список пакетов:
$ sudo apt-get update
Установим terminator – удобный эмулятор терминала, который позволяет разбивать окно на несколько панелей, что очень удобно при работе с ROS:
$ sudo apt-get install terminator
Теперь установим необходимые ROS-пакеты. Мы установим пакеты для работы с суставами роботов, преобразования URDF-файлов, симуляции Gazebo и контроллеров
$ sudo apt-get install ros-humble-joint-state-publisher-gui
$ sudo apt-get install ros-humble-xacro
$ sudo apt-get install ros-humble-gazebo-ros
$ sudo apt-get install ros-humble-ros2-control
$ sudo apt-get install ros-humble-ros2-controllers
$ sudo apt-get install ros-humble-gazebo-ros2-control
$ sudo apt-get install ros-humble-moveit
2. Установка Colcon и настройка автодополнения:
Colcon – это инструмент для сборки ROS-пакетов. Нам нужно установить его и настроить автодополнение команд для удобства работы в терминале.
Установим сам colcon (для ROS Humble, обычно он входит в desktop-full, но лучше убедиться).
Следуйте процессу установки с сайта: https://docs.ros.org/en/humble/Tutorials/Beginner-Client-Libraries/Colcon-Tutorial.html
Проверить работу автодополнения можно, набрав colcon и нажав Tab. Вы должны увидеть список доступных команд.
- Установка Python-библиотек для работы с последовательными портами:
Для работы с некоторыми аппаратными платформами и отладки может понадобиться библиотека pyserial для общения по COM-портам.
Сначала установим утилиту pip для управления Python-пакетами:
$ sudo apt-get install python3-pip
Затем установим саму библиотеку pyserial:
$ pip install pyserial
Заключение
Поздравляем! Вы проделали большую работу: установили VS Code, добавили все необходимые расширения и настроили окружение для удобной работы с ROS и Colcon. Теперь ваша виртуальная машина Ubuntu с ROS 2 готова к тому, чтобы стать вашей полноценной разработческой станцией. В следующих постах мы будем использовать эти инструменты для создания и сборки наших первых ROS-проектов.
Продолжайте изучать и экспериментировать – мир робототехники открыт для вас!