Традиционно обучение роботов новым задачам ранее требовало глубоких знаний в программировании. С появлением коллаборативных роботов процесс программирования стал проще и доступнее. Однако будущее робототехники видится в создании роботов, способных обучаться «на основе демонстрации» (Learning from Demonstration, LfD), перенимая навыки у человека интуитивно понятными способами. Группа инженеров Массачусетского технологического института (MIT) сделала значительный шаг в этом направлении, представив универсальный демонстрационный интерфейс (Versatile demonstration interface (VDI) «три в одном», который кардинально упрощает и делает более гибким процесс обучения.
Проблема: Ограниченность методов обучения
До сих пор роботы, обучающиеся на практике, обычно использовали только один из трех основных демонстрационных подходов:
1. Дистанционное управление: оператор управляет роботом дистанционно (например, с помощью джойстика).
2. Кинестетическое обучение: оператор физически перемещает манипулятор робота, задавая нужные движения.
3. Естественное обучение: оператор выполняет задачу самостоятельно, используя инструмент, а робот наблюдает и копирует действия.
Каждый метод имеет свои сильные стороны в зависимости от задачи и предпочтений пользователя, но отсутствие единого инструмента, поддерживающего все три, ограничивало гибкость и круг потенциальных «учителей».
Решение MIT: Универсальный демонстрационный интерфейс (VDI)
Команда под руководством профессора Джули Шах (Julie Shah) и Майка Хагеноу (Mike Hagenow) разработала портативное устройство, решающее эту проблему. VDI представляет собой насадку с интегрированными датчиками, которая крепится к инструментальному интерфейсу стандартного коллаборативного манипулятора.

Технические детали и функциональность:
- Аппаратное оснащение: Интерфейс оснащен камерой и визуальными маркерами для точного отслеживания своего положения и ориентации в пространстве. Ключевым компонентом являются датчики усилия, измеряющие давление и силу, прикладываемые при выполнении задачи.
- Три режима работы в одном устройстве:
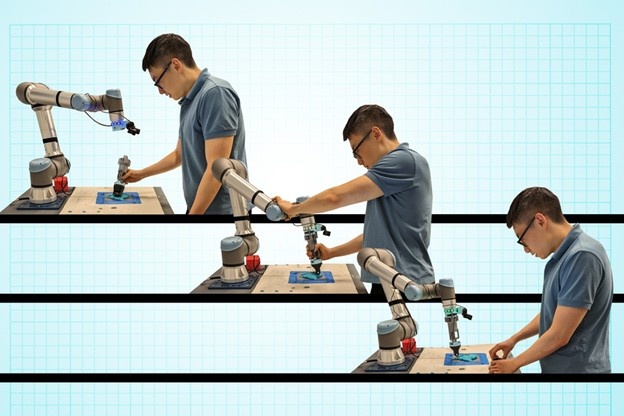
- Дистанционное управление: VDI закреплен на манипуляторе робота. Человек использует приложение (например, с джойстиком) для удаленного управления всем роботом. Камера VDI записывает движения робота, создавая обучающие данные.
- Физическое манипулирование (Кинестетика): VDI закреплен на манипуляторе. Человек непосредственно берет и перемещает манипулятор, демонстрируя нужные действия с помощью функции свободный привод. Датчики VDI фиксируют прикладываемые усилия и записывается траектория.
- Непосредственная демонстрация (Естественное обучение): VDI отсоединяется от робота. Человек берет его в руки и выполняет задачу самостоятельно, как обычным инструментом. Камера отслеживает движения VDI, а датчики усилия регистрируют взаимодействия с объектами. Эти данные затем используются роботом для имитации задачи после обратного подключения VDI.
Тестирование и обратная связь от пользователей
Для проверки эффективности VDI команда MIT провела эксперимент с участием экспертов в области производства из местного инновационного центра. Добровольцы использовали робота с VDI для обучения двум типичным производственным задачам:
- Запрессовка: Установка штифтов в отверстия (имитация монтажных операций).
- Формовка: Равномерное распределение эластичного вещества (аналогичного тесту) по поверхности стержня (имитация термоформования).
Каждый участник применял все три метода обучения для обеих задач.
Результаты:
- В целом добровольцы отдали предпочтение естественному методу обучения (непосредственная демонстрация с отсоединенным VDI).
- Однако эксперты четко обозначили сценарии, где другие методы имеют преимущества:
- Дистанционное управление: Идеально для обучения работе с опасными/токсичными материалами на расстоянии.
- Кинестетика: Эффективна для корректировки положения робота при перемещении тяжелых грузов или точной настройки траектории.
- Естественное обучение: Лучше всего подходит для задач, требующих деликатности и высокой точности движений.
Значение и перспективы
Разработка VDI предлагает несколько ключевых преимуществ:
- Повышенная гибкость обучения: роботом можно обучать наиболее удобным для пользователя и подходящим для конкретной задачи методом.
- Расширение круга пользователей: обучение роботов становится доступным не только программистам, но и специалистам в своей предметной области (рабочим на производстве, медперсоналу).
- Расширение набора навыков робота: разные люди могут обучать одного робота разным задачам, используя оптимальный для каждой метод. Например, на одной производственной линии: удаленное обучение работе с токсинами → кинестетическое обучение упаковке → естественное обучение нанесению логотипа.
- Ускорение адаптации: позволяет быстро корректировать действия робота «на лету» без необходимости сложного перепрограммирования.
«Мы пытаемся создать высокоинтеллектуальных и квалифицированных помощников, которые смогут эффективно работать с людьми над выполнением сложных задач. Мы считаем, что гибкие демонстрационные инструменты могут быть полезны не только на производстве, но и в других сферах, где мы надеемся увидеть более широкое применение роботов, например в быту или при уходе за больными», — подчеркивает Майк Хагеноу.
Дальнейшие шаги
Исследователи планируют усовершенствовать конструкцию крепления VDI на основе полученных отзывов и продолжить тестирование интерфейса для обучения роботов более широкому спектру задач. Разработка будет представлена в деталях на конференции IEEE IROS в октябре 2025.
Универсальный демонстрационный интерфейс MIT представляет собой значительный прогресс в области взаимодействия человек-робот, делая процесс обучения роботов более естественным, доступным и адаптивным, что открывает двери для их более широкого и эффективного внедрения в разнообразные сферы человеческой деятельности.
<-