В прошлый раз мы говорили о том, что такое ROS и почему он так важен для создания умных роботов. Сегодня мы переходим от теории к практике и покажем, как развернуть полноценную среду для работы с ROS 2 прямо на вашем компьютере под управлением Windows. Для этого мы будем использовать связку из VirtualBox и операционной системы Ubuntu 22.04 LTS (Jammy Jellyfish).
Зачем это нужно? Во-первых, виртуальная машина (ВМ) позволяет создать изолированное окружение. Вы можете экспериментировать с установкой нового ПО, настраивать системы и даже допускать ошибки, не рискуя нарушить работу вашей основной операционной системы. Во-вторых, большая часть инструментов и примеров для ROS разрабатывается и тестируется именно в Linux-среде, поэтому установка Ubuntu даст вам полный доступ ко всей экосистеме ROS.
Итак, приступим к настройке вашего нового "робототехнического полигона"!
Часть 1: Установка VirtualBox – Ваш портал в мир Linux
VirtualBox – это бесплатное и мощное программное обеспечение от Oracle, которое позволяет запускать одну или несколько операционных систем на вашем компьютере одновременно. Представьте его как отдельный "компьютер внутри вашего компьютера".
- Скачивание VirtualBox:
Перейдите на официальный сайт VirtualBox: www.virtualbox.org и скачайте последнюю версию для вашей операционной системы (Windows hosts). - Установка VirtualBox:
Процесс установки стандартен для Windows. Запустите скачанный файл установщика и следуйте инструкциям на экране. Вам предложат выбрать директорию установки и компоненты, которые будут установлены. В большинстве случаев можно оставить все настройки по умолчанию. Во время установки могут появиться запросы на установку сетевых драйверов – согласитесь с ними.
Часть 2: Создание и настройка виртуальной машины с Ubuntu 22.04
Теперь, когда VirtualBox установлен, создадим нашу виртуальную машину и установим на нее Ubuntu.
- Скачивание образа Ubuntu 22.04 LTS:
Нам понадобится установочный образ операционной системы. Скачайте последнюю версию Ubuntu Desktop 22.04 LTS (Jammy Jellyfish). LTS (Long Term Support) означает, что эта версия будет поддерживаться обновлениями в течение длительного времени, что идеально для стабильной работы. Рекомендую пользоваться именно сборкой Jammy Jellyfish https://releases.ubuntu.com/22.04/ - Создание новой виртуальной машины в VirtualBox:
Запустите VirtualBox и нажмите кнопку "Создать" (New).
Имя и операционная система: Введите имя для вашей ВМ (например, "Ubuntu_ROS") и выберите Тип: Linux, Версию: Ubuntu (64-bit).
Оперативная память (RAM): Для комфортной работы с Ubuntu и ROS рекомендуется выделить минимум 4 ГБ оперативной памяти. Если ваш компьютер имеет 16 ГБ или более, смело выделяйте 8 ГБ.
Жесткий диск: Выберите "Создать новый виртуальный жесткий диск" (Create a virtual hard disk now).
Тип диска: VDI (VirtualBox Disk Image) – стандартный формат VirtualBox.
Формат хранения: Динамический виртуальный жесткий диск (Dynamically allocated) – это означает, что файл диска будет расти по мере заполнения, экономя место на вашем физическом диске.
Размер диска: Для Ubuntu и последующей установки ROS 2 рекомендуется выделить минимум 30-40 ГБ. Если вы планируете много экспериментировать, лучше выделить 50 ГБ или больше. Если оставить стандартные параметры с 25 ГБ, то вы рискуете даже не начать работу с ROS 2. - Настройка параметров ВМ:
Перед первым запуском ВМ, выделите ей немного больше ресурсов для лучшей производительности:
Выберите созданную ВМ, нажмите "Настроить" (Settings).
Система -> Процессор: Увеличьте количество выделяемых ядер процессора (если ваш процессор позволяет, например, до 2 или 4 ядер).
Дисплей -> Экран: Увеличьте видеопамять (Video Memory) до максимума (обычно 128 МБ) и включите "3D-ускорение" (Enable 3D Acceleration). - Установка Ubuntu 22.04:
Выберите вашу ВМ и нажмите "Запустить" (Start).
VirtualBox запросит выбрать стартовый диск. Укажите путь к скачанному ранее ISO-образу Ubuntu 22.04.
Запустится установщик Ubuntu. Следуйте инструкциям на экране:
Выберите язык.
Выберите раскладку клавиатуры.
Выберите тип установки: "Обычная установка" (Normal installation) с установкой стандартных приложений (включая браузер, утилиты и т.д.) будет хорошим выбором для новичка.
Выберите тип установки диска: "Стереть диск и установить Ubuntu" – это безопасно, так как мы работаем на виртуальном диске, который мы только что создали.
Введите имя пользователя, имя компьютера и пароль.
Дождитесь завершения установки и перезагрузите ВМ.
Часть 3: Установка ROS 2 Humble Hawksbill в Ubuntu на VirtualBox
Итак, у нас есть рабочая среда Ubuntu 22.04 в VirtualBox. Теперь самое время установить ROS 2! Мы будем устанавливать версию Humble Hawksbill, которая является долгосрочной поддержкой (LTS).
Найти её можно по ссылке https://docs.ros.org/en/humble/Installation/Ubuntu-Install-Debs.html
Методом проб и ошибок был выявлен наиболее актуальный путь установки: следующие команды исполняйте поочерёдно (доллар копировать не нужно):
Примечание: смените язык раскладки с американского английского на британский, иначе терминал не откроется. А также замените в настройках sudo имя admin на ваше имя пользователя (или смените имя пользователя на admin).
$ locale # check for UTF-8
$ sudo apt update && sudo apt install locales
$ sudo locale-gen en_US en_US.UTF-8
$ sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
$ export LANG=en_US.UTF-8
$ locale # verify settings
$ sudo apt update && sudo apt install curl gnupg2 lsb-release
$ sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
$ echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(lsb_release -cs) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
$ sudo apt update
$ sudo apt upgrade
$ sudo apt install ros-humble-desktop
$ source /opt/ros/humble/setup.bash
$ ros2
И после ввода "ros2" вы должны увидеть заветное окно:
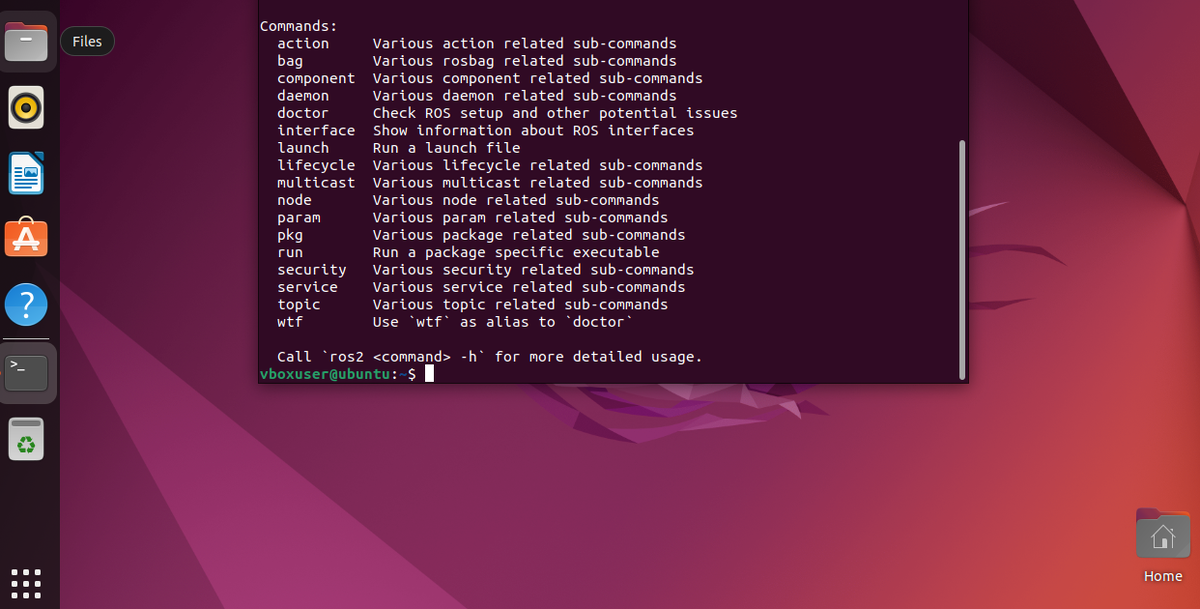
Поздравляю, установка завершена!