Новая система позволяет акустическим роботам совместно транспортировать объекты
Хотя до сих пор роботы в основном развертывались по отдельности, в качестве команд они могут выполнять более широкий спектр сложных миссий с удивительной скоростью и эффективностью. Например, они могут помочь в быстрой транспортировке объектов в целевые места, перемещаясь по различной местности и, возможно, даже проходя через труднодоступные для человека среды.
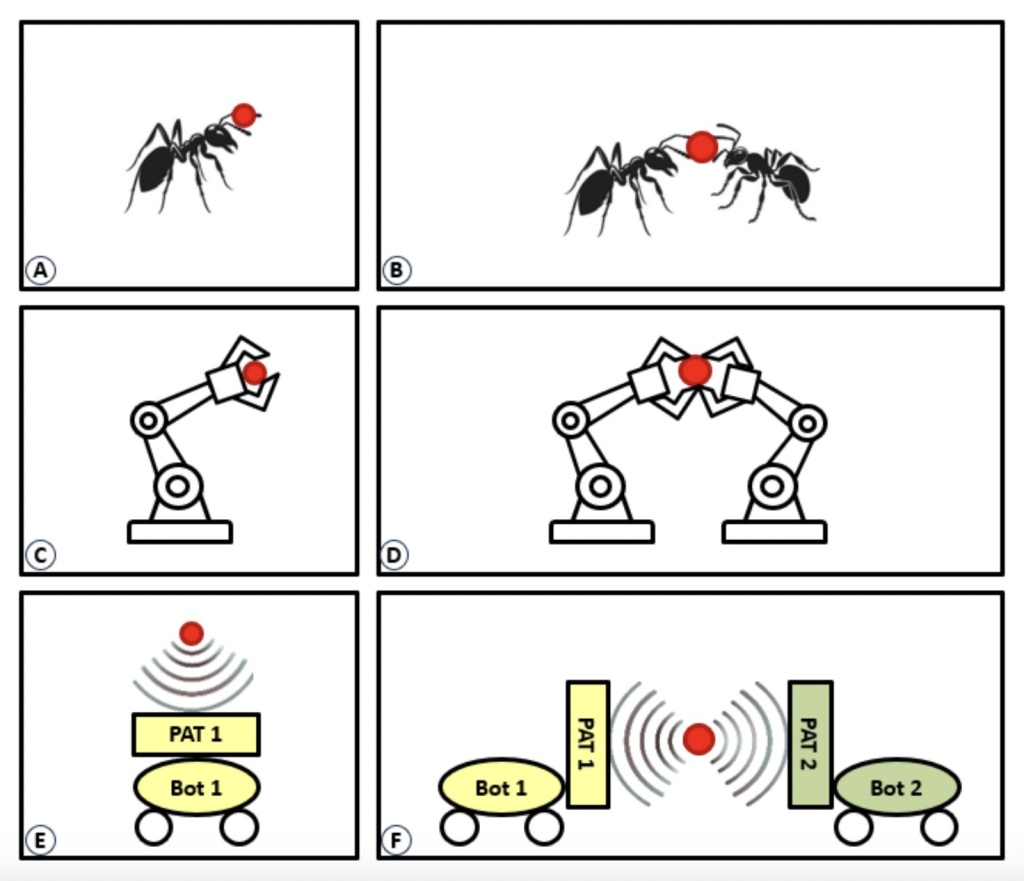
Исследователи из Университетского колледжа Лондона (UCL) недавно разработали новую систему, которая позволяет роботам совместно транспортировать объекты, используя при этом высокочастотные звуковые волны, которые не могут быть услышаны человеком. Эта система, описанная в статье на сервере препринтов arXiv, вдохновлена коллективной динамикой муравьев и других насекомых, которые, как известно, тщательно координируют свое поведение при переносе кусочков пищи, мусора или других крошечных предметов обратно в свое гнездо.
«Кооперативный транспорт, одновременное движение объекта несколькими агентами, широко наблюдался в биологических системах, таких как колонии муравьев, которые повышают эффективность и приспособляемость в динамичных средах», — пишут Нарсимлу Кемсарам, Акин Делибаси и их коллеги в своей статье. «Вдохновленные этими природными явлениями, мы представляем новую акустическую роботизированную систему для транспортировки бесконтактных объектов в воздухе».
Кемсарам, Делибаси и их коллеги разработали новую систему для совместной транспортировки объектов роботами, которая опирается на ультразвуковые преобразователи (т.е. небольшие устройства, излучающие ультразвуковые звуковые волны) и встроенную роботизированную систему управления. Небольшие ультразвуковые излучающие устройства создают интерференционные картины в воздухе, формируя поля акустического давления.
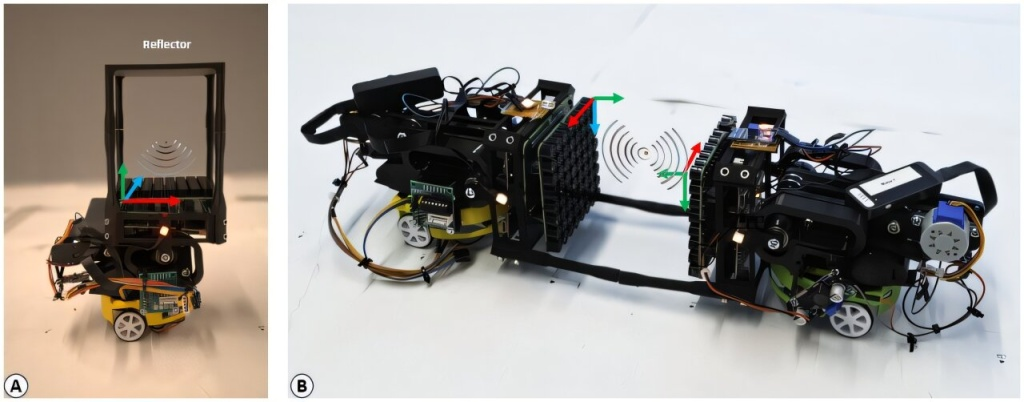
По сути, это области, в которых звуковое давление достаточно сильное, чтобы захватывать, левитировать и удерживать небольшие объекты в воздухе. Система управления, с другой стороны, генерирует эти акустические поля в определенных местах, позволяя роботам манипулировать левитирующими объектами с высоким уровнем точности.
«Наша система использует фазированные ультразвуковые преобразователи и роботизированную систему управления на борту для создания локализованных полей акустического давления, что позволяет точно манипулировать взвешенными в воздухе частицами и роботами», — пишут Кемсарам, Делибаси и их коллеги. «Мы классифицируем стратегии бесконтактной транспортировки объектов на независимую транспортировку (нескоординированную) и направленную вперед совместную транспортировку (скоординированную), проводя параллели с биологическими системами для оптимизации эффективности и надежности».
Исследователи разработали две различные стратегии транспортировки объектов: первая побуждает роботов работать независимо, а вторая побуждает их координировать свои действия, имитируя поведение насекомых в роях. Они проверили свою систему и протестировали обе стратегии в серии реальных экспериментов, используя прототипы разработанных ими акустических роботов.
«Предлагаемая система экспериментально проверена путем оценки стабильности левитации с использованием микрофона в измерительной лаборатории, эффективности транспортировки через систему захвата движения в фазовом пространстве и точности синхронизации часов с помощью осциллографа», — объясняют Кемсарам, Делибаси и их коллеги. «Результаты демонстрируют возможность как независимого, так и кооперативного воздушного транспорта объектов».
В будущем система может быть проверена в более широком спектре экспериментов для дальнейшей оценки ее потенциала для решения реальных проблем. Он может оказаться ценным для эффективной обработки и транспортировки материалов, а также для микросборки различных устройств и продуктов, и, возможно, даже для некоторых биомедицинских приложений.