Инженер из Германии разработал четвероногого оригами-робота Fold Walker. Его основа и ноги робота печатаются как единая деталь, что упрощает сборку. Каждая нога состоит из плоских пластин и имеет по две степени свободы с осями вращения, расположенными под прямым углом. Помимо ходьбы робот может ползать, двигаться боком (как краб), умеет прижимать ноги ближе к центру тела, чтобы проходить через ограниченные по ширине проемы, и способен использовать одну пару ног для перемещения грузов. Статья опубликована в Advanced Robotics Research.
Японское искусство складывания фигурок из бумаги помогает инженерам создавать устройства, способные быстро изменять форму и объем. Например, датские инженеры использовали принципы оригами при разработке прототипа космического аппарата, корпус которого складывается для экономии места под обтекателем ракеты, а их южнокорейские коллеги создали прототип ровера с колесами, меняющими геометрию прямо во время движения. В робототехнике оригами также находит применение. Паттерны оригами, например, использовались в конструкции захвата для безопасного отлова морских организмов, а также в прототипе медицинского микроробота для доставки лекарств в организме.
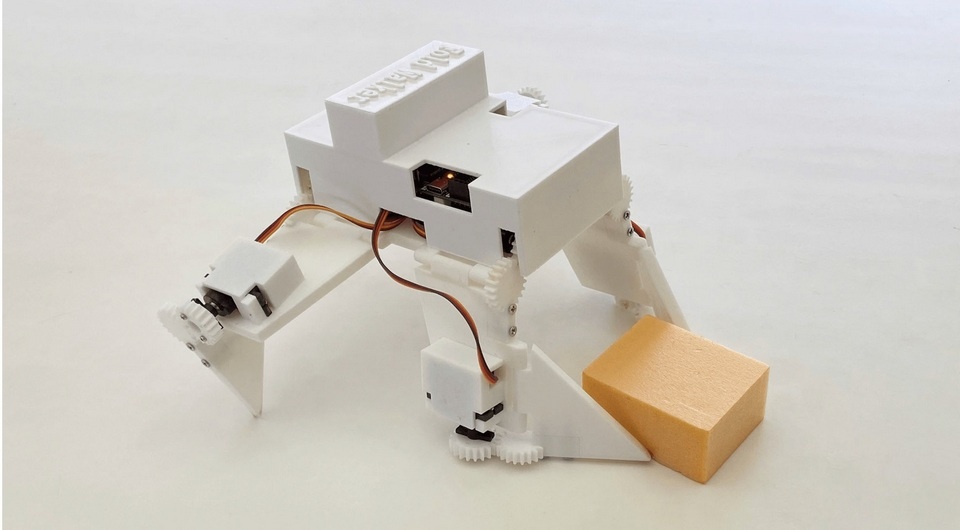
Инженер И Лун Сунь (Yilun Sun) из Технического университета Мюнхена тоже использовал технику оригами при разработке четвероногого робота Fold Walker. Основа корпуса и все четыре ноги печатаются на 3D-принтере за один раз в виде плоской развертки вместе с шарнирами, что упрощает последующую сборку. После печати плоскую заготовку складывают в рабочую форму, устанавливают восемь сервоприводов с шестернями, добавляют защитный кожух, микроконтроллер, Bluetooth-модуль и батарею. Вес готового робота составляет 390 грамм, управляется он дистанционно, со смартфона.
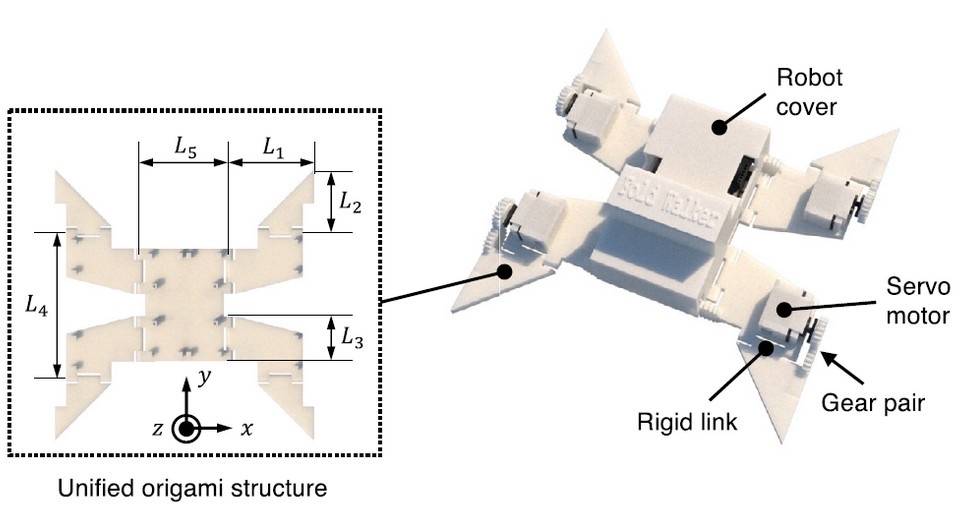
Каждая нога оригами-робота состоит из двух пластин, соединенных между собой и с центральной частью складками, которые располагаются под прямым углом друг к другу, что позволяет изначально плоской ноге принимать множество различных трехмерных конфигураций. Для управления ходьбой автор построил детальную модель, описывающую положение конца ноги в пространстве в зависимости от углов поворота шарниров. Fold Walker умеет передвигаться несколькими способами. Основной режим — ходьба, напоминающая походку рептилий: три ноги находятся на земле, пока четвертая переносится вперед. Режим можно использовать для быстрого перемещения по относительно ровному рельефу. Вторая походка похожа на ползание и предназначена для пересечения сложных неровных участков, особенно с рыхлой или вязкой поверхностью. В этом режиме робот опирается на тело, пока все четыре ноги переносятся вперед, а затем, отталкиваясь одновременно, они передвигают корпус.
Также Fold Walker может ходить боком, как краб, и двигаться способом, напоминающим переползание по-пластунски: перемещение вперед происходит за счет движений ног только с одной стороны, в то время как другая пара остается пассивной и просто волочится по поверхности. Конечности в этом режиме прижимаются ближе к центру корпуса, благодаря чему робот может проползать через ограниченные по ширине проемы и щели.
Наконец, в пятом режиме Fold Walker может использовать одну пару ног как захват для предметов. Свободная пара при этом используется для дальнейшей ходьбы, позволяя роботу перемещать предмет с места на место. На данный момент Fold Walker управляется оператором, однако в будущем планируется оснастить его набором датчиков для автономной работы. С ним робот сможет самостоятельно выбирать режим движения и адаптироваться к окружающей среде без внешних команд.
А еще оригами помогло швейцарским инженерам при создании модульного робота Mori3. Он состоит из множества отдельных базовых элементов, каждый из которых представляет собой полноценного робота треугольной формы. Они могут самостоятельно передвигаться и соединяться друг с другом, образуя большого робота, способного ходить и изменять форму.