Захват для промышленного робота – это устройство, которое крепится к манипулятору и позволяет ему взаимодействовать с внешними объектами: поднимать, перемещать, поворачивать, удерживать или обрабатывать их. Захват является конечным исполнительным элементом и выполняет роль «рук» робота, обеспечивая возможность физического взаимодействия с изделием.
Выбор правильного захвата определяет эффективность автоматизации, безопасность процессов и качество выпускаемой продукции. От типа захвата зависит, как робот будет взаимодействовать с деталью: аккуратно ли он возьмёт хрупкое изделие или надёжно удержит тяжёлый груз.
Классификация захватов промышленных роботов
Захваты для роботов классифицируются по принципу действия, конструкции, способу управления и сфере применения. Расскажем про основные виды:
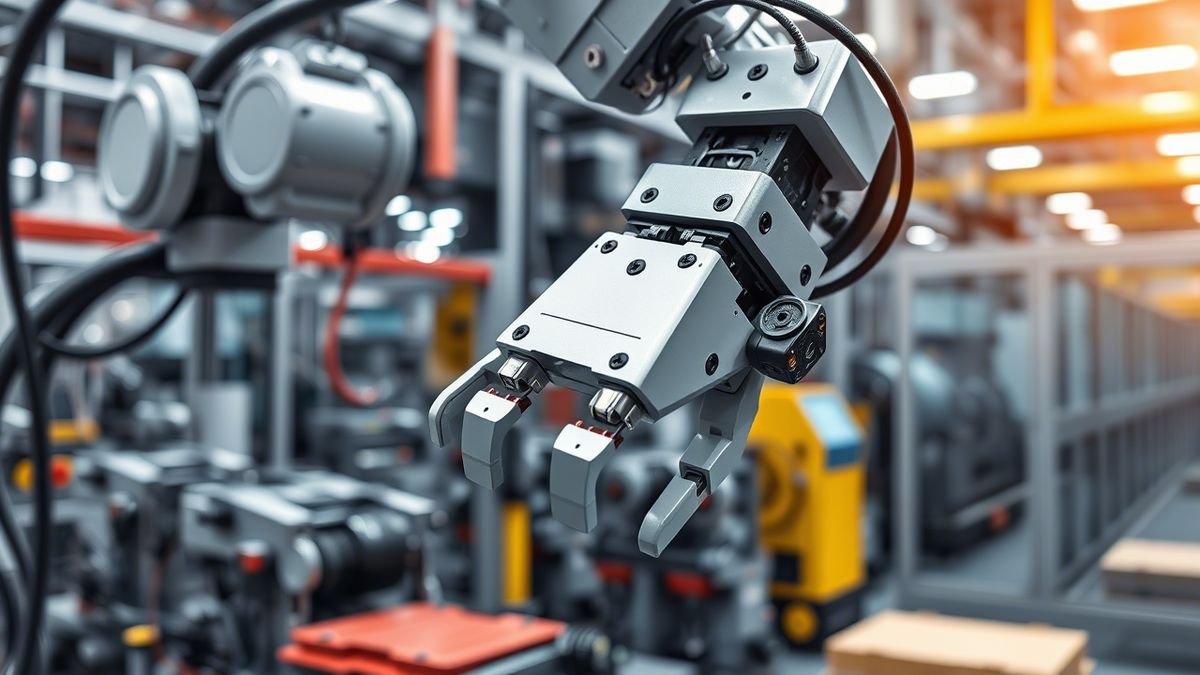
Механические захваты
По-другому грейферные или захватные устройства. В них используются механические пальцы или губки, которые смыкаются вокруг объекта.
Двухпальцевые захваты – классический вариант, используется для простых операций перемещения.
Многопальцевые захваты – имитируют человеческую руку, позволяют более точно и аккуратно брать предметы сложной формы.
Поворотные захваты – могут вращать деталь, что важно при сборке и ориентировании изделия.
Преимущества:
- высокая точность позиционирования;
- простота обслуживания;
- широкая сфера применения.
Но у механических захватов для роботов ограниченная адаптация к различным формам, для корректировки требуется замена устройства.
Вакуумные захваты
Работают за счёт создания разрежения воздуха (вакуума), которое прижимает объект к поверхности захвата. Используются для бережного обращение с изделием (например, со стеклом, пластиком, картоном).
Конструкция вакуумного захвата для робота включает: вакуумные присоски (различных форм и размеров), насосы или эжекторы, систему управления давлением.
Преимущества:
- возможность захвата плоских, гладких и неровных поверхностей;
- мягкий контакт с изделием;
- быстрая смена деталей.
В работе вакуумные захваты для роботов требуются источник питания и правильную настройку контроля давления. Не подходят для работы с поверхностями их пористых материалов.
Магнитные захваты
Используют электромагнитное поле для удержания металлических деталей. Часто применяются на складах и при работе с крупногабаритными стальными заготовками.
Преимущества:
- высокая грузоподъёмность;
- быстрый захват и открепление;
Магнитные захваты подходят только для изделий прямых форм и из материалов, которые магнитятся.
Адаптивные (гибкие) захваты
Современные решения, способные изменять форму или силу захвата в зависимости от параметров объекта. Например, мягкие силиконовые захваты или пневматические «мышцы».
Преимущества:
- возможность работы с разными формами без перенастройки;
- бережное обращение с хрупкими предметами;
- высокая степень автоматизации и адаптации.
Гибкие захваты требуют специального обслуживания.
Как выбрать подходящий захват для производства
Выбор захвата зависит от следующих факторов:
- форма и вес изделий, на которых основывается производство;
- материал детали;
- требования к скорости и точности;
- возможность смены инструмента в процессе работы;
- бюджет проекта.
Если производство работает с разными типами изделий, стоит рассмотреть возможность использования быстросъёмных систем или универсальных адаптеров, которые позволят менять захваты без остановки производства.
Захваты промышленных роботов – важный элемент любой автоматизированной системы. От правильного выбора этого компонента зависит эффективность работы робота и качество выпускаемой продукции. Современные технологии позволяют создавать универсальные, точные и мощные захваты, способные удовлетворить требования даже самых сложных производств.
Компания YES Robotics специализируется на поставках промышленных и коллаборативных роботов и сопутствующего оборудования для автоматизированных систем, предлагая клиентам в т.ч и широкий спектр решений в области захватов – от стандартных механических моделей до адаптивных и интеллектуальных систем. Наши специалисты помогут подобрать решения, соответствующие задачам заказчика, обеспечивающие максимальную эффективность и надёжность.
Читайте также: