Выпускник направления «Фундаментальная информатика и информационные технологии» Троицкого филиала ЧелГУ Евгений Рейнгард при создании выпускной квалификационной работы применил современные методы компьютерного зрения и машинного обучения для создания протеза кисти руки. Это концептуально новый подход к мехатронике и управлению протезами.

Евгений решил заняться поиском новых конструкций и концепций управления протезами в связи с увеличением количества травмоопасных производств, экологическими проблемами, природными катаклизмами и желанием помочь людям с ампутированными конечностями.
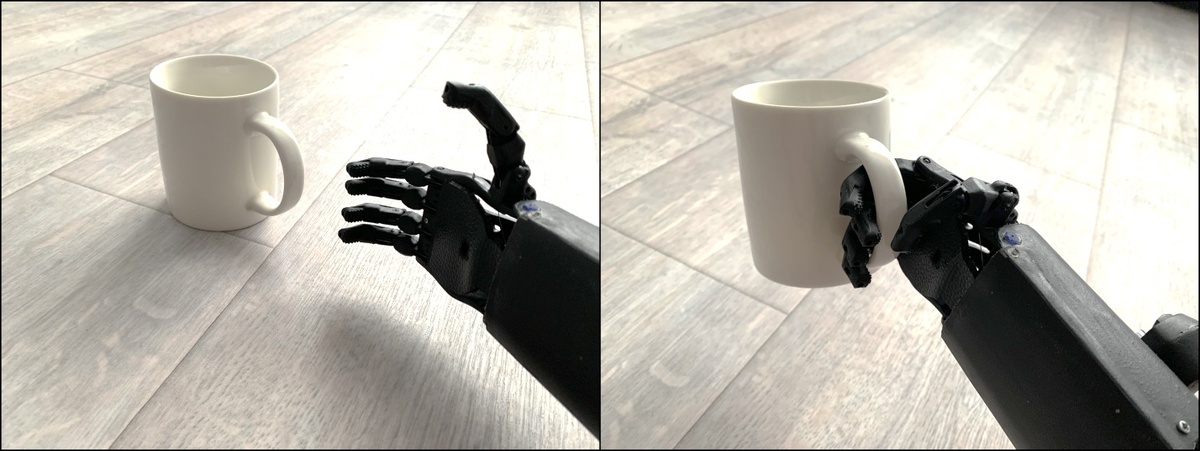
«Особенностью протеза является концептуально новый подход, заключающийся в использовании технологий искусственного интеллекта для автоматизации схвата протеза кисти руки для различных классов объектов, — комментирует выпускник. — Говоря простыми словами, протез самостоятельно определяет, какой объект оказывается в области захвата, и подбирает такой вид схвата, который позволяет удержать предмет в искусственной руке. При этом следует отметить, что скорость распознавания и выполнение схвата практически сопоставимы с реакцией человека. Такой подход в значительной степени устраняет неудобства управления протезом для людей с ампутированными конечностями».
Евгений Рейнгард работал над дипломом вместе с научным руководителем — доцентом Андреем Фадеевым. В течение нескольких лет они занимались поиском новой концепции взаимодействия мехатроники протеза кисти руки и его управления.
«Изначально поиск осуществлялся в направлении создания бионического протеза, — говорят авторы. — Но в процессе работы был выявлен ряд недостатков такого подхода. В частности, обнаружены сложности при настройке и эксплуатации. Немаловажным оказалась и цена такого протеза. Поэтому выбор был сделан в сторону технологий компьютерного зрения и машинного обучения».
Авторы применили оригинальный подход, заключающийся в организации взаимодействия мехатроники протеза на базе микропроцессора Arduino с системой распознавания объектов. Она включает в себя web-камеру и программное решение, выполняющее распознавание объектов на основе искусственной нейронной сети.