
Что такое векторное управление?
Векторное управление - это способ управления асинхронным электродвигателем, при котором преобразователь частоты (ПЧ) отслеживает и управляет величиной и направлением тока в обмотках статора. Для этого ПЧ разделяет ток статора на два условных вектора:
- Id - компонент тока, формирующий магнитный поток (аналогично постоянному магниту);
- Iq - компонент тока, создающий вращающий момент.
Именно поэтому метод называется векторным - ток в статоре представляется в виде векторов, привязанных к вращающейся системе координат (dq-системе), синхронизированной с ротором. Это позволяет отдельно управлять моментом и потоком, как в двигателях постоянного тока, но с преимуществами асинхронных машин.
Как работает ПЧ в векторном управлении?
ПЧ строит математическую модель электродвигателя, используя данные о токах по фазам, напряжении и, при наличии, сигнале с энкодера. Эта модель позволяет:
- определить положение и скорость ротора;
- рассчитать Id и Iq;
- управлять выходным напряжением и частотой через ШИМ (широтно-импульсную модуляцию).
Почему важно указывать параметры двигателя и проводить автонастройку?
Для корректной работы векторного управления ПЧ должен точно знать:
- Сопротивление статора (Rs) - влияет на точность оценки тока и напряжения;
- Сопротивление ротора (Rr) - используется для оценки момента и скольжения;
- Индуктивность рассеяния (leakage inductance) - не участвует в создании полезного потока, но влияет на качество регулирования.
Также в расчетах участвуют множество параметров которые используются при строении математической модели.
Без этих параметров ПЧ не сможет построить адекватную модель, и возникнут проблемы:
- вибрации и «дрожание» при малых скоростях;
- подрагивание двигателя или шум;
- перегрев и нестабильность.
Автонастройку следует регулярно повторять, особенно:
- при сильных изменениях температуры (сезонность);
- после замены или ремонта двигателя;
- при изменении схемы подключения (звезда/треугольник);
- при заметных изменениях поведения двигателя.
Векторное управление без датчика (SVC)
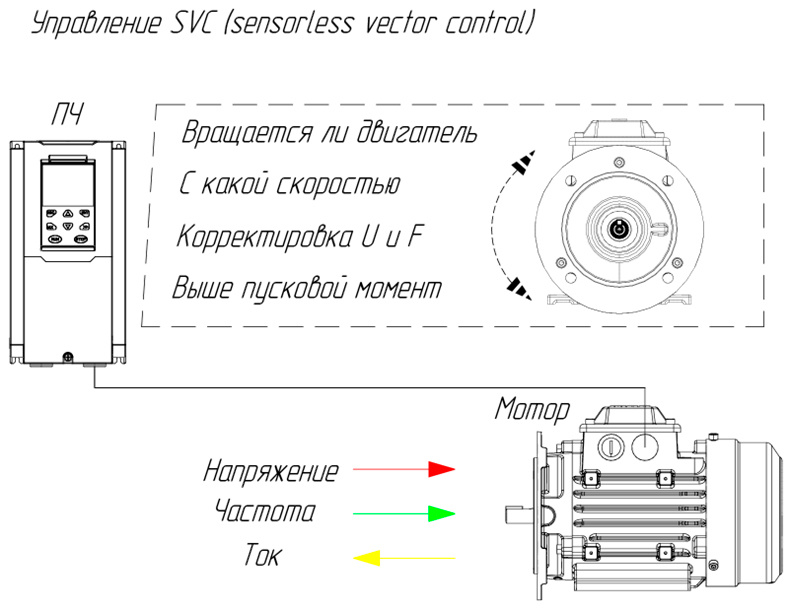
В этом режиме ПЧ не получает сигнала с датчика положения (энкодера), но сам вычисляет положение ротора, анализируя токи. Это позволяет:
- обеспечить пусковой момент до 180%;
- точно управлять скоростью при переменных нагрузках.
Преимущества SVC:
- Высокий момент на старте без обратной связи;
- Хорошая стабильность скорости;
- Простота реализации.
Недостатки:
- Требует очень точной настройки;
- Нельзя подключать несколько двигателей к одному ПЧ.
Применяется для: конвейеров, дробилок, насосов с нагрузкой на старте и т.п.
Векторное управление с обратной связью (VC)
Здесь ПЧ получает информацию о положении и скорости ротора с энкодера. Это повышает точность и устойчивость:
- Пусковой момент до 200% от номинала;
- Возможность работы на ента даже при резких нагрузках;
- Возможность работы на низкой скорости и даже на нуле.
Преимущества VC:
- Максимально точное управление скоростью;
- Работа в расширенном диапазоне оборотов;
- Полный контроль момента.
Недостатки:
- Требуется установка энкодера и экранированного кабеля;
- Нельзя управлять несколькими двигателями от одного ПЧ;
- Также важна корректная автонастройка.
Применяется в: металлообработке, ЧПУ, лифтах, системах с высоким требованием к точности.
SVC vs VC — сравнение режимов
Где применяется векторное управление?
- Промышленность: металлообработка, текстиль, упаковка
- Транспорт: лифты, подъемники, эскалаторы
- Прецизионные системы: роботы, ЧПУ, дозаторы, пресс-станки
Заключение
Векторное управление - это интеллектуальный и гибкий метод регулирования электродвигателя, обеспечивающий точный контроль за моментом и скоростью. Благодаря работе в dq-системе координат и модели двигателя, ПЧ может динамически реагировать на изменения нагрузки, сохраняя эффективность и стабильность.
Если вы хотите получить высокую точность, плавный пуск, устойчивую работу и максимальную защиту - выбирайте ПЧ с поддержкой векторного управления. Эта технология стала стандартом в современной автоматике и машиностроении.