😁😉
Что там с нашей разработкой дрона с распознаванием...
Мы активно продолжаем разрабатывать нашу систему автономного управления дроном и одним из этапов является разработка системы регулирования для наведения на объект (слежения за объектом).
Для этого мы решили использовать экстремальный ПИ регулятор.
Принцип его работы таков:
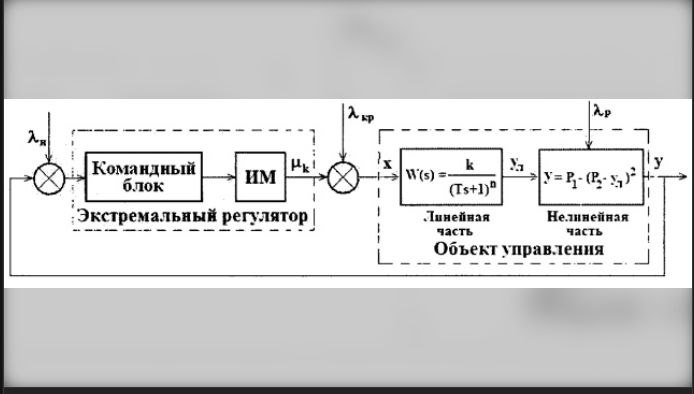
1. Система технического зрения оценивает положение дрона относительно положения цели и рассчитывает ошибку позиционирования. Ошибка передается на регулятор положения, который рассчитывает управляющие сигналы для полетного контроллера.
2. Регулятор положения является системой экстремального управления, которая на каждом шаге управления производит управляющее воздействие, уменьшающее значение целевой функции, в нашем случае расстояние до цели.
Начало положено, а о дальнейших шагах разработки мы напишем позже…
#разработка