![Робот-паркурщик Raibo умеет бегать по стенам и высоко прыгать [ВИДЕО]](https://avatars.dzeninfra.ru/get-zen_doc/271828/pub_6845926c4df62f4c5b85efb9_684592744df62f4c5b85f626/scale_1200)
Сотрудники Лаборатории робототехники и искусственного интеллекта Южной Кореи представили четвероногого робота Raibo, способного выполнять сложные элементы паркура. Прототип умеет бегать по вертикальным стенам, перепрыгивать высокие препятствия и перемещаться по сложному рельефу.
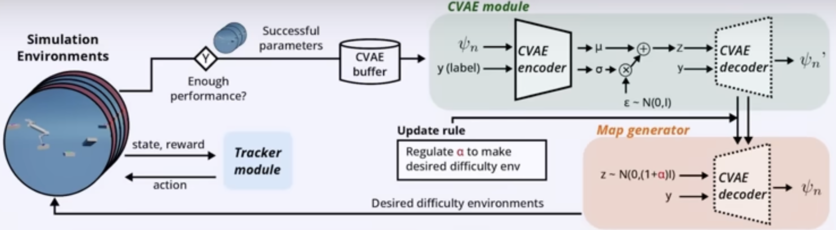
В основе технологии — нейросетевой контроллер, который в реальном времени анализирует окружающую среду и планирует оптимальную траекторию движения. В Raibo используется гибридная система управления, объединяющая планировщик маршрута и трекер движений.
Робот создаёт 3D-карту пространства с помощью камер и сенсоров обратной связи. Например, Raibo может менять траекторию прыжка в последний момент, если препятствие смещается. В тестах робoт продемонстрировал прыжки на 1,3 метра, бег по вертикальным поверхностям и передвижение по каменистой местности.
Инженеры уже работают над второй версией робота, которая станет быстрее, манёвреннее и безопаснее. Исследователи видят применение таких машин в спасательных операциях, особенно в зонах стихийных бедствий или на опасных промышленных объектах, куда затруднительно или рискованно отправлять людей. В будущем их можно будет использовать даже для исследования других планет.