Регуляторы оборотов обеспечивают управление скоростью и направлением вращения моторов. В отличие от интегрированных 4-в-1 ESC, внешние (или одиночные) регуляторы оборотов устанавливаются отдельно для каждого мотора. Такой формат имеет значительные преимущества, включая простоту ремонта, улучшенное охлаждение, лёгкость диагностики и высокую надёжность.
Сегодня мы попробуем установить регуляторы оборотов моторов Hobbywing skywalker 100A и подключить их к нашей сборке на базе отечественного полетного контроллера "ФлайТех"
Hobbywing skywalker 100A: технические характеристики
Для начала рассмотрим технические характеристики Hobbywing skywalker 100A.
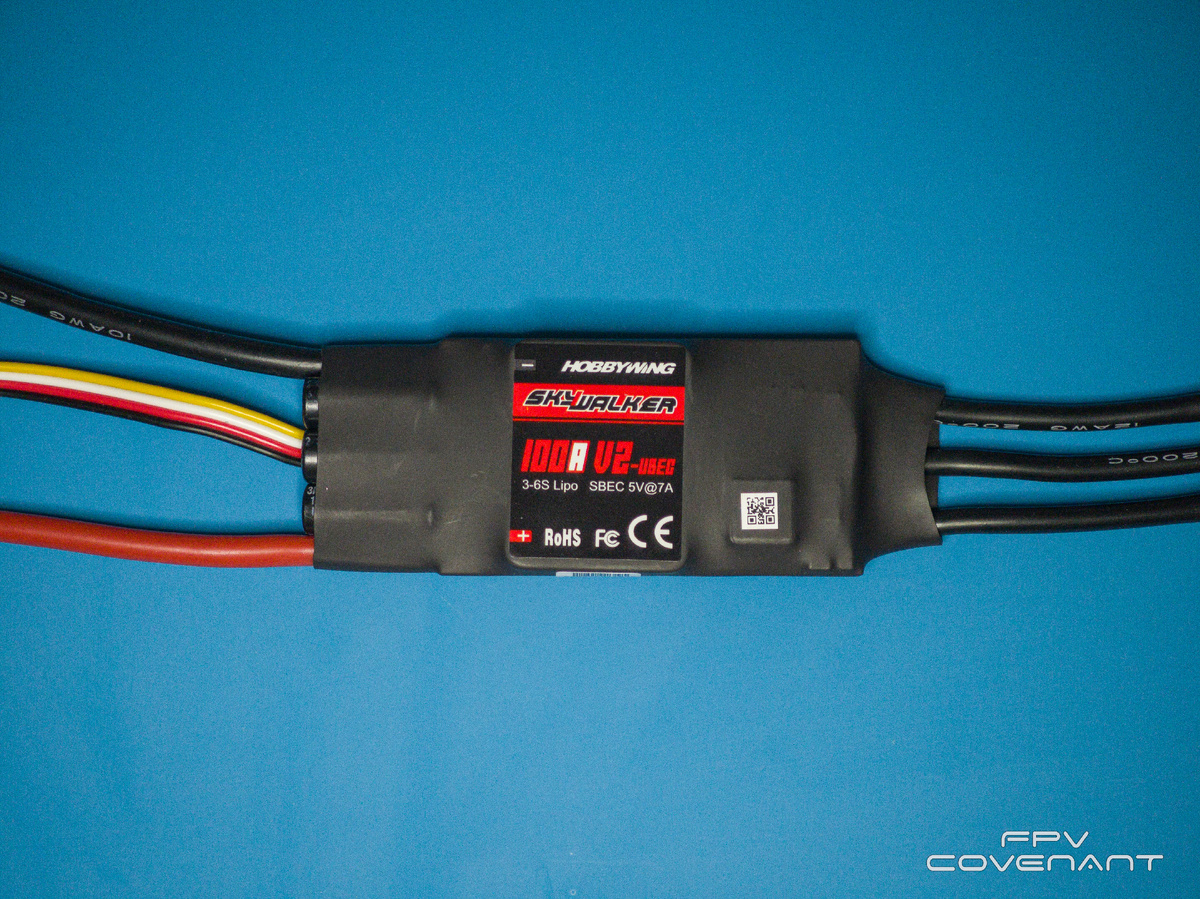
- Максимальный постоянный ток регулятора - 100А;
- Максимальный кратковременный ток регулятора (в рывке - 10 секунд) - 120А;
- Питание: 3-6S LiPo;
- BEC: Switch Mode 5V/7A;
- Провода: Input Wires 12AWG 150mm / Output Wires 14AWG 100mm;
- Тип моторов - бессенсорные, бесколлекторные моторы;
- Размеры: 85x36x9mm;
- Вес : 92г. без проводов.
Регулятор оборотов моторов имеет два провода питания имеющих возможность подключения аккумуляторной батареи 3-6S. Три провода на выходе служат для подключения моторов. И 4 провода: красный и черный - выход с понижайки на 5 Вольт для подключения приемника, белый провод - сигнал газа и желтый сигнал RPM.
Внешние регуляторы оборотов моторов: установка на раму
Так как в нашей раме ТУРА нет места для установки внешних регуляторов оборотов моторов, было принято решение установить их на лучи. Для этого сделаем модель крепления для распечатки на 3D принтере.
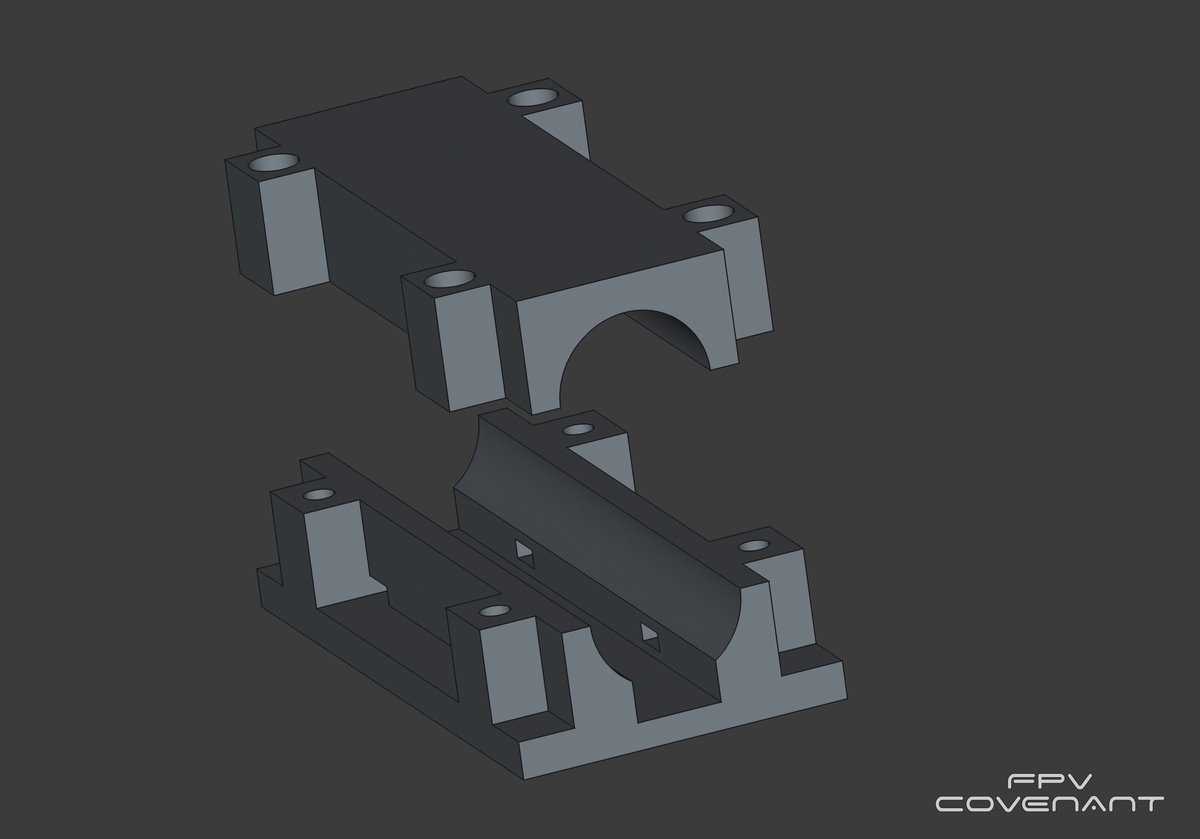
Пробуем распечатать и посмотрим что получится. Крепления имеют отверстия под стяжки и место для прокладки проводов моторов. Фиксация происходит с помощью 4 болтов.
Для желающих распечатать модель на 3D принтере - можно скачать тут.
Устанавливаем на лучи рамы.
Теперь у нас есть возможность установить регуляторы оборотов моторов на крепления и приступить к пайке проводов к модулю питания Matek FCHUB-12S.
Hobbywing skywalker 100A: подключение к модулю питания Matek FCHUB-12S
Ранее в наших статьях мы уже рассказывали как установили на нашу экспериментальную раму ТУРА модуль распределения питания Matek FCHUB-12S. Он упрощает сборку дрона, заменяя сложную проводку компактной схемой. Прочитать об этом можно тут:
Сегодня мы подключим наши регуляторы оборотов моторов к этому модулю питания.
Мы видим свободные контакты для подключения силовых проводов питания регуляторов оборотов. И по три контакта G-минус, TLM - телеметрия, S - сигнальный провод для управления регулятором.
Для начала припаиваем силовые провода и два тонких провода, черный на контакт G и белый на контакт S.
Для удобного соединения проводов моторов и регулятора оборотов припаяем бананы.
Для поиска в интернете можно использовать название: GC4013-M
Аккуратно все монтируем на луче и закрепляем с помощью стяжек.
В дальнейшем если у нас будут неправильно крутиться моторы, мы можем просто переподключить два любых банана местами - это очень удобно чем перепаивать.
После монтажа всех регуляторов оборотов, мы готовы к первому включению. Тут нужно обратить внимание - наш модуль питания Matek FCHUB-12S позволяет подключить батарею 12S, но Hobbywing skywalker 100A поддерживает питание только 6S. Значит это напряжение и подаем!
Hobbywing skywalker 100A: настройка Betaflight Configurator и первое включение
Для настройки наших регуляторов требуется подключить USB кабель от компьютера к полетному контроллеру и запустить Betaflight Configuator.
Нас интересует вкладка моторы. Выставляем протокол работы ESC - PWM. Другие протоколы Hobbywing skywalker 100A не поддерживает.
Значение MOTOR_STOP лучше отключить, оно может нас ввести в заблуждение при запуске двигателей. Обязательно нажимаем кнопку сохранить изменения.
В этой же вкладке мы можем запустить пробный тест моторов - в правой части экрана. Хотим предупредить - газовать без пропеллеров не надо. Достаточно чуть запустить двигатели и проверить их работу и направление.
Мы ранее уже показывали лайфхак, как проще всего рассмотреть направление движения - достаточно одеть на вал бумажку.
Если потребуется изменить направление, достаточно поменять между собой два любых разъема подключения моторов к регулятору.
Теперь требуется запустить моторы с пульта управления и проверить работу. Зайдем во вкладку "Режимы" Betaflight Configurator и проверим что ARM настроен на первом канале.
Все отлично! Мы готовы к пробному запуску.
Хочется обратить внимание - все тесты, пробные запуски мы осуществляем без пропеллеров!
Так же первое подключение аккумулятора требуется проводить со "Smoke test" - этот прибор спасет наш дрон, если мы где то в процессе пайки сделали короткое замыкание.
В нашем случае моторы заработали с пульта управления, регуляторы подключены верно - все отлично!
Наш тестовый дрон на базе рамы ТУРА практически готов к полетам.
Следующим этапом будет установка аналоговой видеосвязи отечественного производителя AnalogovNet.
Так как установка внешних регуляторов оборотов моторов у нас проходила впервые, ждем вопросов и дополнений по этой теме в комментариях.
Внешние регуляторы оборотов для дронов обеспечивают модульность, упрощая ремонт и замену, улучшают охлаждение и предлагают гибкость в настройке под конкретные задачи. Их надёжность и простота диагностики делают их отличным выбором для пилотов, стремящихся к оптимальной производительности в полётах.