Во второй части сборки классической пятерки мы установим периферию (юнит и приемник) и дособерем раму до конца. Поехали! Первая часть здесь.
Шаг седьмой: пайка приемника ELRS
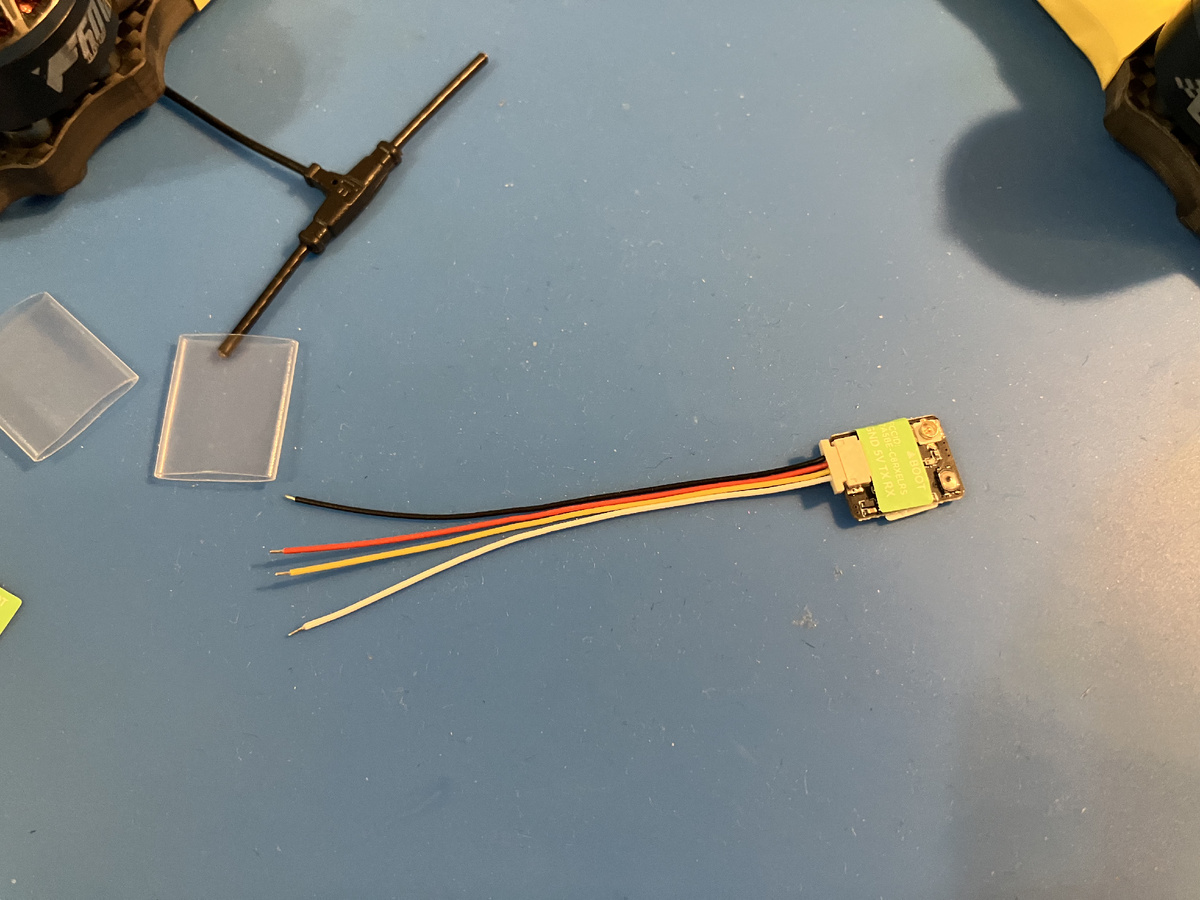
Мой любимый приемник ELRS 2.4 — iFlight ELRS Nano RX. При своих смешных размерах и весе он обладает чудесной особенностью — разъем на плате. Больше не нужно тыкать крохотную плату страшным раскаленным жалом паяльника, достаточно воткнуть входящий в комплект шлейф в колодку и припаяться другой стороной к полетнику.
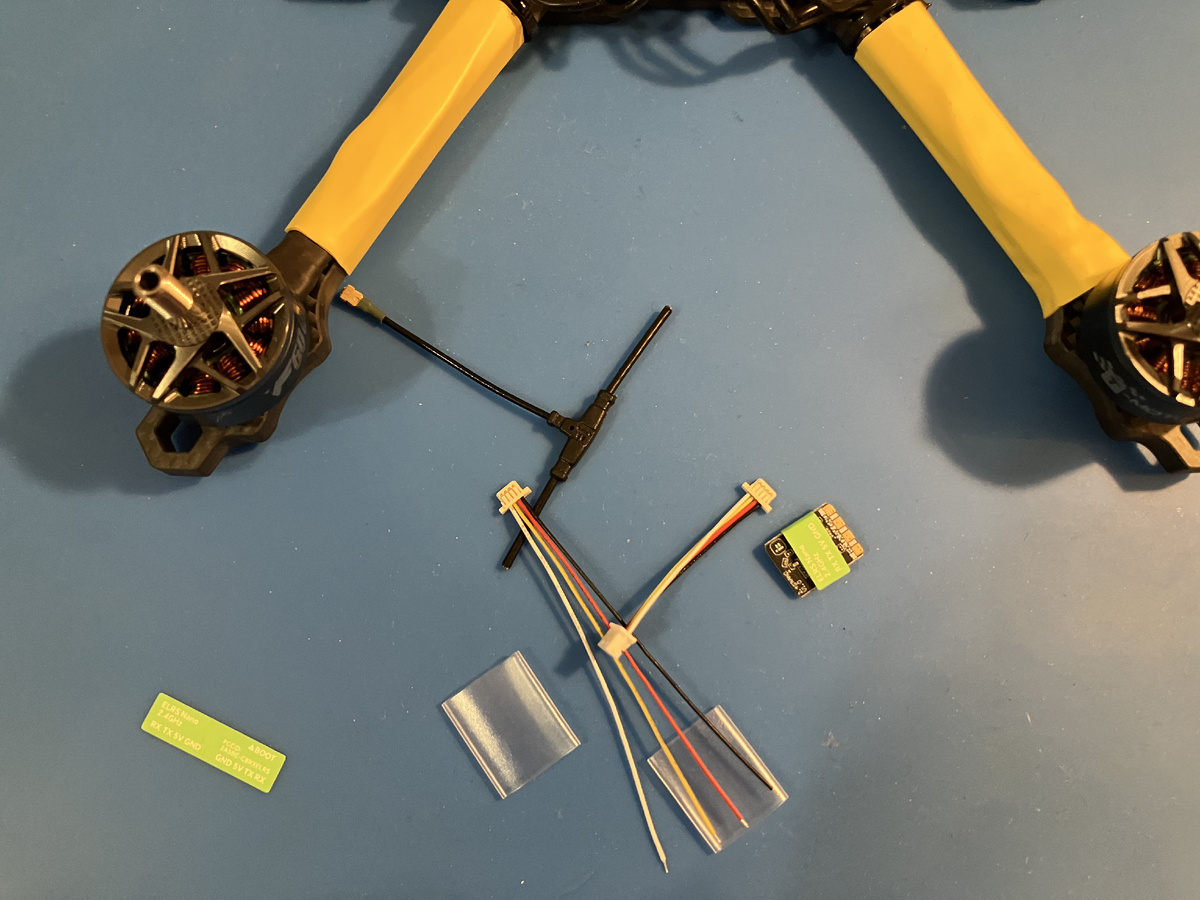
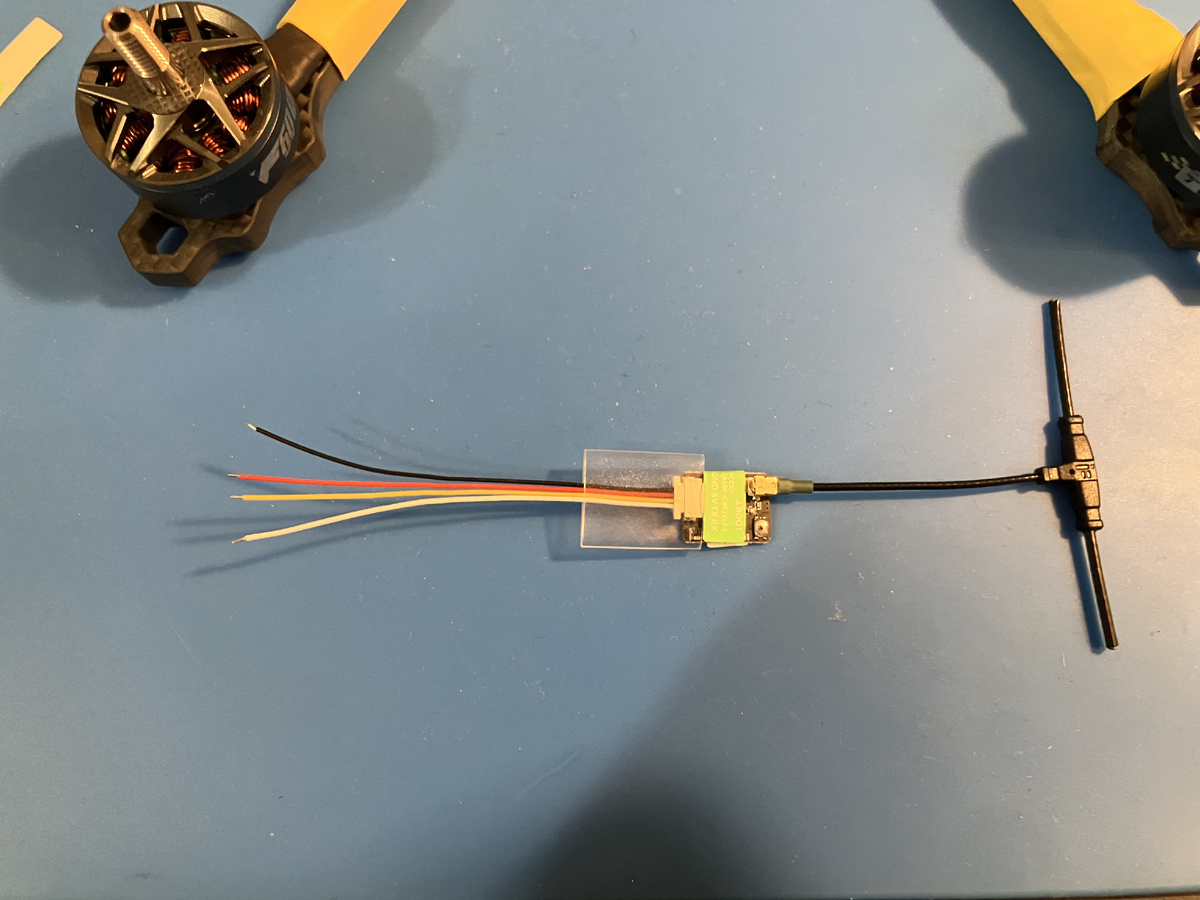
Втыкаем шлейф в разъем на приемнике (не путая ориентацию, естественно). Одеваем термоусадку и вставляем в IPEX-разъем антенну. Лучше сейчас, чем потом вынимать разъем/снимать антенну (на нее термоусадка не налезет).
Теперь обращаем взор на полетный контроллер. Нужно выбрать UART на котором будет "сидеть" приемник. Юарт должен быть свободным, то есть не должен быть занят другой периферией. Подробнее об этом я писал в материале Как паять и подключать почти все к полетнику.
Не забудьте убрать мелкой плоской отверткой Б7000 с четырех площадок перед пайкой. Наносим на них олово. Это самые мелкие точки пайки за всю сборку.
Теперь паяем проводки шлейф приемника к площадкам на полетнике. Смазываем кончики проводков от приемника флюсом. Паяем аккуратными точечными «прикладываниями» жала на 320-340 градусах в момент когда кончик провода касается площадки (у меня каждый раз немного трясутся руки на этом этапе). Теперь недокоптер можно отложить в сторону и заняться «головой».
Шаг восьмой: монтаж камеры юнита и «головы»
Вытаскиваем на искусственный свет все, что нам нужно для сборки головы: болты, металлические пластины, стойки и TPU-элементы. На этом этапе нужно сверится с инструкцией по сборке рамы вашего производителя.
Собираем половинку клетки камеры целиком.
Теперь нужно вытащить полетник с родных болтов и проложить провод от камеры к юниту (он будет стоять в задней части рамы) поверх ESC.
Скрепляем «голову» с основной частью дрона. На этом этапе набор непонятных деталей уже становится похож на дрон.
Шаг девятый: монтаж юнита и приемника
Теперь нужно смонтировать юнит. Я ставлю его на скотч 3М. Но перед этим нужно провести небольшую операцию со шлейфом юнит-полетник. Поскольку третий юарт у нас занят приемником, а в разъеме под юнит на полетнике R3 (UART 3) зарезервирован для управления через пульт DJI (SBUS) нужно … вынуть этот лишний провод из колодки шлейфа. Теперь точно ELRS будет работать без проблем пользуясь своим свободным UART 3.
Размещаем вырезанный квадратик скотча 3M в задней части «палубы». После установки юнита сверху на него на тот же 3М кладем приемник.
Монтируем задние стойки и ставим на них задний модуль из TPU-печати. А вот и первый просчет — антенны юнита не проходят через цельные отверстия модуля. Придется снять юнит и отцепить антенны.
Ничего сложного в разборке корпуса юнита для снятия антенн нет. Открутить четыре болта, поднять крышку, вытащить антенны, просунуть их в TPU-модуль.
Затем повторяем все операции в обратном порядке: монтируем антенны в модуль, вставляем антенны в разъемы на плате юнита, прикручиваем крышку юниты на комплектные болты.
Шаг десятый: финальная сборка
Почти готово! Монтируем оставшиеся стойки в раму. Прикручиваем нейлоновые гайки на болты стека сверху. Кладем сверху верхнюю деку и прикручиваем. Приклеиваем коврик для батарейки и просовываем ремень.
Теперь нужно вспомнить о болтающейся антенне ELRS-приемника и оставшихся болтах моторов — в первой части мы крепили моторы всего на два болта из четырех. Переворачиваем дрон вверх-тормашками и доделываем.
Пятерка готова. Впереди: проверка на КЗ, базовая настройка в Betaflight и активация юнита. Спасибо за внимание!
Отправить автору на пару рам Quadmula Siren F5 Split