Рассмотрим эволюцию релейной защиты, начиная с электромеханических реле и заканчивая современными микропроцессорными устройствами.
Безопасность и бесперебойность работы электроэнергетических систем зависят от эффективной релейной защиты.

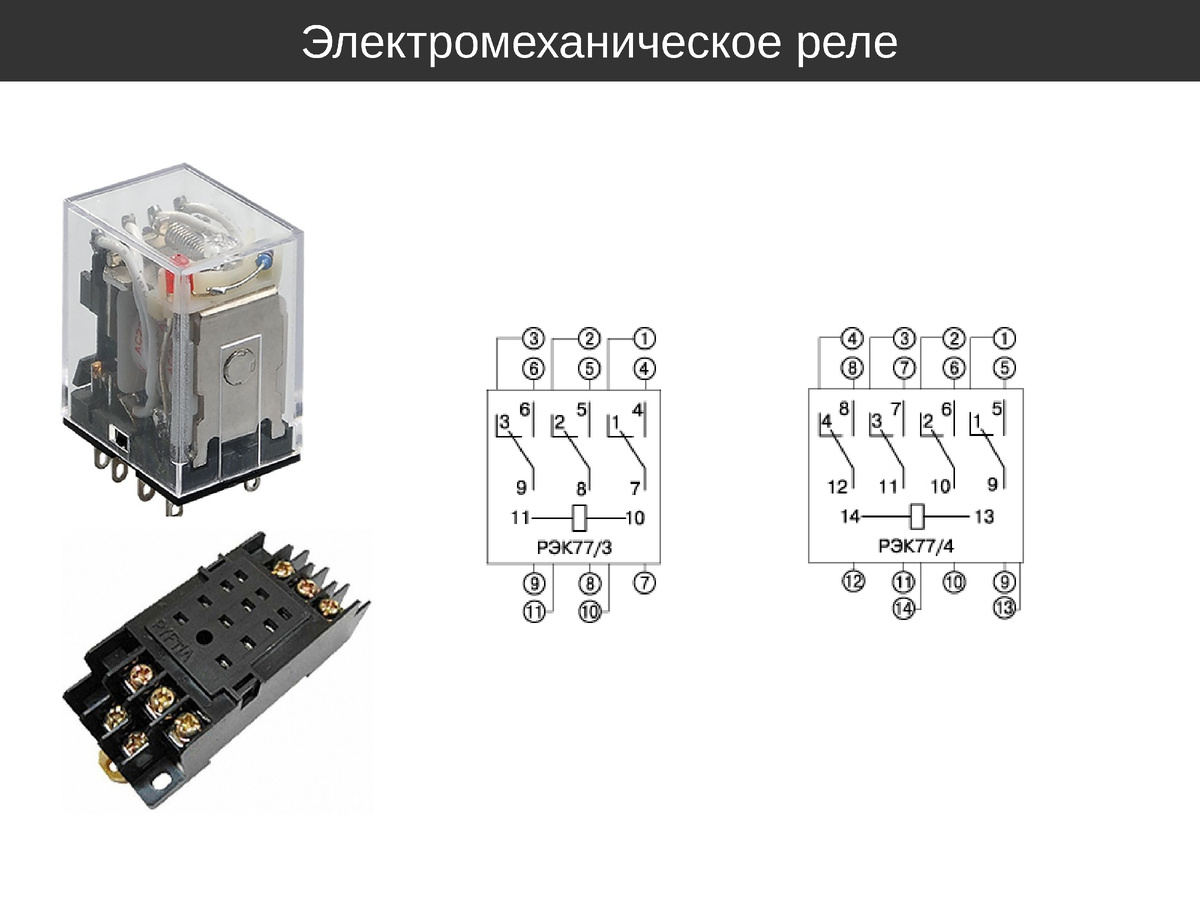
1. Электромеханические реле
Исторически первыми широко используемыми типами реле были электромеханические устройства. Принцип их работы основывается на физических законах электромагнетизма.
Конструкция и принцип работы
Простейшее электромеханическое реле состоит из катушки индуктивности, подвижного элемента (сердечника) и контактов. При подаче тока на катушку возникает магнитное поле, притягивающее сердечник и замыкающее контакты.
Для примера рассмотрим электромагнитное реле с обмоткой сопротивления R и индуктивностью L. Ток, проходящий через катушку, определяется уравнением Кирхгофа:
V = L * di/dt + i*R
где `i(t)` — мгновенное значение тока, t — время, V — напряжение питания.
Время отклика такого реле определяется скоростью нарастания магнитного поля и массой подвижных частей. Среднее время срабатывания составляет порядка десятков миллисекунд.
Преимущества электромеханических реле:
- Высокая надёжность при правильном обслуживании.
- Возможность визуального контроля положения контактов.
Недостатки:
- Ограниченность рабочих частот и высокая инерционность.
- Необходимость регулярной проверки и регулировки.
2. Статические реле
Следующим этапом эволюции стали статические реле, выполненные на полупроводниках. Здесь отсутствуют движущиеся части, что повышает долговечность и снижает потребность в регулировке.
Конструкция и принцип работы
Принцип работы статических реле основан на сравнении сигналов напряжения и тока с заданными пороговыми значениями. Обычно используются выпрямительные мосты, операционные усилители и компараторы.
Рассмотрим схему статического реле максимальной токовой защиты. Выходное напряжение U_out вычисляется следующим образом:
U_out = K_i * I_in - U_th
где `K_i` — коэффициент усиления, `I_in` — входной ток, `U_th` — пороговое напряжение.
Реле сработает, если выходное напряжение превысит установленный порог:
|U_out| > |U_trig|
Преимущества статических реле:
- Высокое быстродействие и отсутствие износа механических деталей.
- Компактность и простота монтажа.
Недостатки:
- Чувствительность к помехам и колебаниям температуры.
- Требовательность к качеству питания.
3. Микропроцессорные реле
Последним поколением являются микропроцессорные реле, построенные на базе цифровой обработки сигнала. Такие устройства позволяют реализовать сложные алгоритмы защиты и обладают функциями самодиагностики.
Конструкция и принцип работы
Основой микропроцессорного реле является аналого-цифровой преобразователь (ADC), процессор и программное обеспечение. Входные сигналы напряжения и тока сначала фильтруются, затем поступают на ADC, преобразуются в цифровой формат и обрабатываются процессором согласно запрограммированным алгоритмам.
Например, реализация функции минимальной временной задержки выполняется следующим образом:
T_d = T_0 + k*(I/I_min - 1)
где `T_d` — задержка срабатывания, `T_0` — минимальное время задержки, `k` — постоянный коэффициент, `I` — текущее значение тока, `I_min` — минимальный ток срабатывания.
Преимущества микропроцессорных реле:
- Гибкость настройки и возможность обновления программного обеспечения.
- Широкий функционал и поддержка удалённого доступа.
Недостатки:
- Сложность программирования и настройка пользователем.
- Более высокие требования к квалификации обслуживающего персонала.
4. Выбора типа реле
Электромеханические реле: подойдут для несложных задач, где требуются низкие затраты и умеренные требования к быстродействию. Примеры применения: простые промышленные объекты, бытовое использование.
Статические реле: рекомендуются там, где требуется повышенная точность и меньший износ, например, на предприятиях среднего уровня сложности с ограниченными финансовыми ресурсами.
Микропроцессорные реле: идеальны для крупных предприятий, объектов инфраструктуры и стратегических систем, где важны надёжность, многофункциональность и способность к расширению функционала посредством обновлений ПО.