Навигация и исследование поверхности водоемов позволяют автономным плавательным роботам выполнять широкий спектр задач: от сбора данных до обмена информацией и получения энергии от солнечных источников. Однако подобная среда зачастую отличается высокой степенью неструктурированности из-за водной растительности и различного мусора. Это требует от роботов высокой маневренности и способности к быстрому передвижению.
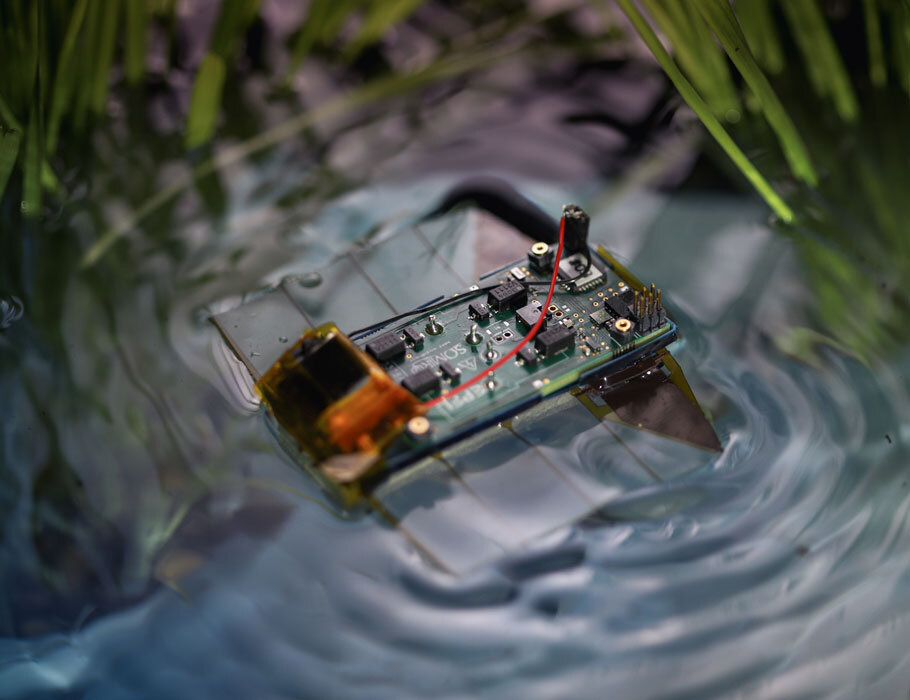
Этот компактный, маневренный и полностью автономный робот сантиметрового масштаба, способный перемещаться со скоростью до 5,1 см/с и поворачиваться со скоростью до 195 градусов в секунду. Движение осуществляется с помощью пары мягких грудных плавников толщиной в миллиметр. Бегущие волны на этих плавниках возбуждаются электрическими колебаниями, что обеспечивает эффективное и устойчивое перемещение.
Привод, конструкция робота и источник питания были разработаны как единая система с целью достижения высокой эффективности в компактном формате. Каждый боковой привод представляет собой мягкий электрогидравлический элемент, создающий бегущую волну. Благодаря оптимизации параметров привода удалось снизить его рабочее напряжение до менее 500 В, а потребляемую мощность — до 35 мВт, что позволило обеспечить полностью беспроводную работу устройства.
С использованием экспериментальных данных и моделирования были определены оптимальные размеры, формы и режимы работы компонентов. Робот способен легко перемещаться по узким участкам, между водными растениями и даже проталкивать объекты, масса которых превышает его собственную более чем в 16 раз.
Такие роботы открывают новые возможности для мониторинга и изучения сложных водных экосистем. Они особенно перспективны для акваферм, где могут использоваться для непрерывного сбора данных о состоянии воды и растительности.
Источник: https://www.science.org/doi/10.1126/scirobotics.adr0721
Больше интересного – на медиапортале https://www.cta.ru/