Всем привет! Ниже я дам пояснения как он работает и в чем я вижу его преимущества, но прежде взгляните на картинку.
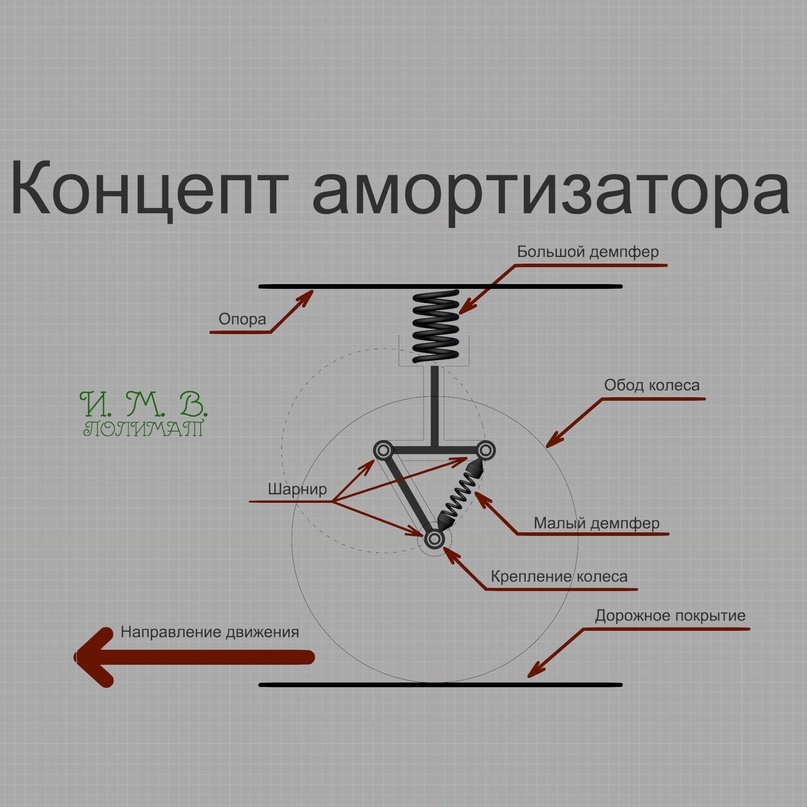
Как видно из рисунка, амортизатором является система использующая в своей работе два демпфера, большой и малый, причем малый демпфер (далее как М-Д) находится под углом относительно большого демпфера (далее как Б-Д) а его нижняя точка крепления (она же точка крепления колеса) в свободном состоянии лежит на линии продольной оси Б-Д которая в свою очередь проходит через середину треугольника . По сути, малый демпфер со всей конструкцией в виде треугольника, является надстройкой к стандартным амортизаторам, обозначенным здесь как большой демпфер.
Что бы пояснить в чем преимущества такой конструкции, обратимся к другому рисунку.
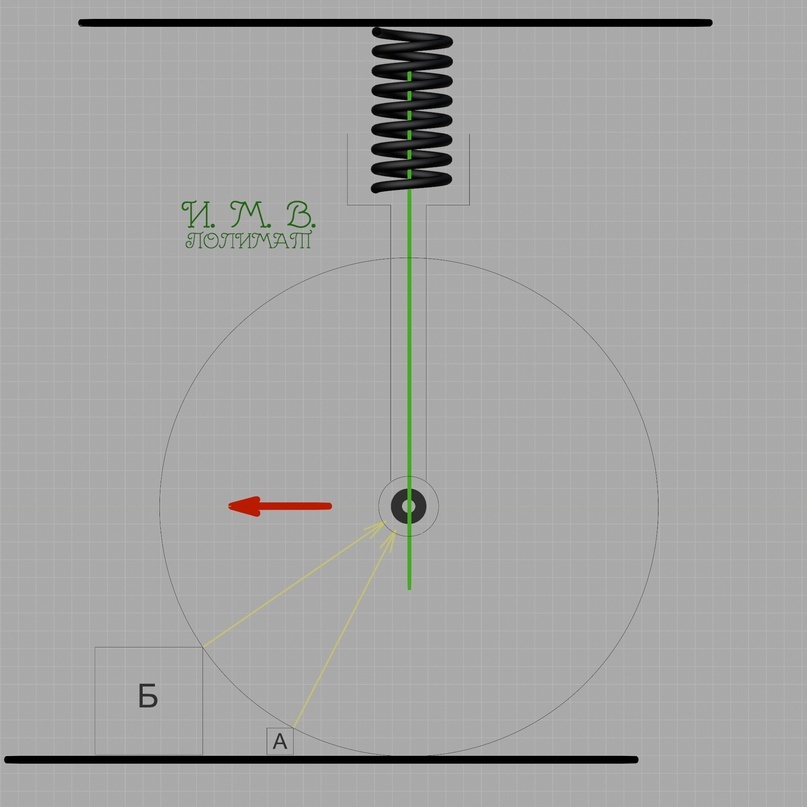
На этой картинке мы видим амортизатор, который тут визуализирован в виде пружины. Колесо, которое катится по ровному покрытию в направлении красной стрелки. Зеленая линия является продольной осью амортизатора. Буквами А-Б обозначены препятствия. Желтыми линиями обозначены вектора сил действующих на систему. Вектор силы приложенной к колесу, всегда направлен от точки касания колеса с препятствием, к его центру, к точке крепления колеса. Из рисунка видно что вектора сил (желтые стрелки) направлены под углом к продольной оси амортизатора (зеленая линия). И чем выше препятствие, тем больше вектор силы направлен к горизонту и меньше в направлении продольной оси амортизатора. И если высота препятствия, точка касания, будет на уровне точки крепления колеса, то есть, находится на высоте радиуса колеса, то вектор силы приложенной к колесу от этой точки, будет направлен перпендикулярно вектору продольной оси амортизатора. А это значит что на амортизатор эта сила не будет действовать никак. Вся сила будет приложена в горизонтальном направлении.
Давайте взглянем на следующий рисунок.
Представим что система стоит на месте или двигается равномерно и прямолинейно. Сверху на нее давит опора с некоторой, фиксированной величиной. Вектор силы действующей на систему будет направлен от точки касания колеса с поверхностью, к его центру (красная стрелка) и будет совпадать с линией продольной оси Б-Д (зеленая линия) и находится под углом к продольной оси М-Д (синяя линия). Давайте проследим за тем как распределены силы, действующие на систему. За начальную точку примем точку, находящуюся на месте контакта колеса с поверхностью (начало красной стрелки). Затем вся сила передается на точку крепления колеса. Затем она распараллеливается на две части, и далее передается на два плеча (два шарнира) которые жестко соединены между собой, а к средней точке крепится Б-Д. То есть, от точки крепления колеса часть силы передается левому шарниру-через жесткое соединение, а часть правому-через пружину. Если принять что пружина М-Д достаточно жесткая для того что бы выдерживать приложенную силу совсем не деформируясь, то получится что вся сила распределится поровну между двумя плечами, шарнирами (при условии что система стоит вертикально ровно) а вектора этих сил будут находится под углом к продольной оси амортизатора, под углом к вертикали. Затем, с двух шарниров силы складываясь передаются к точке крепления Б-Д и от нее с вертикальным вектором на сам Б-Д.
Итак, когда система стоит на месте или двигается равномерно и прямолинейно, то на систему действует только одна сила, гравитация, с вертикальным вектором. В случае же когда система наезжает на препятствие, на систему начинает действовать дополнительная сила, вектор которой противоположен движению, то есть имеет горизонтальную направленность. Обе силы складываются и образуют вектор направленный от точки касания с препятствием к точке крепления колеса, и как мы видим, он почти совпадает с продольной осью М-Д. Это значит, что в момент удара, почти вся сила действующая на систему, будет приложена к М-Д. Что бы лучше понять работу этой системы, погрузимся еще немного глубже. Давайте представим что мы подобрали жесткость пружины М-Д и массу системы такой, что когда на систему действует только вертикально направленная сила, то пружина при этом практически не деформируется. А мы помним что на пружину в этом случае действует только половина, от всей силы приложенной вертикально к системе. То есть, половину от силы приложенной к системе она выдерживает. А теперь представьте что система двигается равномерно и прямолинейно по направлению красной стрелки и в какой то момент натыкается на препятствие.
Как мы выяснили, до момента контакта с препятствием, на систему действовала только вертикальная сила. В момент столкновения на систему стала действовать еще и горизонтальная сила. Обе силы перпендикулярны друг другу. Складываясь эти силы, от точки касания с препятствием, давят на М-Д. На первом рисунке, система находится в состоянии, когда она только, только коснулась препятствия, на втором рисунке, система частично наехала на препятствие. Пунктирными линиями на втором рисунке обозначено состояние системы до наезда на препятствие, когда она находилась в положении как на первом рисунке. Хорошо видно как изменился угол продольной оси М-Д. Он стал более вертикальным, а это значит, что на него увеличилось влияние вертикальной силы приложенной к системе. Чем более, продольная ось М-Д ближе к вертикали, тем сильнее на нее влияет вертикальная сила приложенная к системе.
Тут получается такой эффект. В состоянии, когда на систему воздействует только вертикальная сила (которую мы заранее определили и подогнали систему под неё) система находится в состоянии равновесия. На пружину М-Д действует половина прикладываемой силы. Стоит теперь незначительной, дополнительной силе (которая берется от горизонтальной силы) хоть немного сжать М-Д (вектор от препятствия) как он меняет свой угол в сторону вертикали. А поскольку, вертикальная сила приложенная к системе начинает при этом оказывать большее влияние на М-Д то сжимает пружину еще сильнее. В свою очередь продольная ось М-Д от этого еще больше становится вертикальной, что в свою очередь вызывает еще большее влияние вертикальной силы на М-Д что в свою очередь заставляет еще сильнее сжаться пружину и еще больше повернуться к вертикали и Т.Д..
Такая же история происходит и с движением точки крепления колеса относительно плечей. Обратите внимание на букву А на втором рисунке. Как видим она обозначает расстояние между продольной осью Б-Д и точкой крепления колеса. Обратите внимание что это расстояние появляется только в момент наезда на препятствие. То есть, в момент столкновения с препятствием, вы продолжаете движение так, как будто и нет никакого препятствия. Система, энергию полученную от препятствия перераспределяет на две составляющие, вертикальную и горизонтальную. Вертикальная направлена вверх, горизонтальная по ходу движения. То есть, чем сильнее препятствие тормозит вас, тем сильнее система двигает вас вперед.
В состоянии, когда на систему действует только вертикальная сила, точка крепления колеса находится ровно по середине плечей. Линия пропущенная через эту точку вертикально, делит треугольник пополам. Стоит точке сместится в право, как вертикальная сила действующая на систему, тут же смещается на правое плечо, тем самым сильнее воздействуя на пружину, что в свою очередь заставляет точку крепления колеса еще больше сместиться в право, тем самым еще больше сместив вертикальную силу на правое плечо, что в свою очередь, еще больше сожмет пружину и сместит точку еще правее и Т.Д.
Так, а для чего здесь большой демпфер спросите вы. Как я писал выше, М-Д полученную энергию распределяет на горизонтальную и вертикальную составляющую. Вот вертикальная составляющая и передается Б-Д.
К тому же ему передается накопленная М-Д энергия, если он не успел её сбросить, либо излишняя энергия, которую он не в состоянии в себя поглотить.
На этой картинке-слайде можно проследить как работает система.
Полимат И.М.В.