ДаВсем привет. В особенности любителям рыбалки.
Давненько я не "выходил в эфир" тут. Работа-отдых-работа, времени нет совсем. И вот во время одного из отдыхов проведенных на рыбалке я наконец-то довел до ума свою любимую "игрушку для взрослых" - прикормочный кораблик и решил поделиться с владельцами этого "чуда" накопленной информацией. .

Около года назад была статья, о том как я приобрел себе в неисправном состоянии этот аппарат.
Если коротко - изначально кораблик "не видел" пульт управления, соответственно не двигался. Эта проблема самоустранилась, но появилась другая - кораблик не проходил первоначальную калибровку компаса и при движении не держал курс. В ручном режиме, при движении он рыскал и нужно было всё время подруливать, а на автопилоте двигался "противолодочными" зигзагами. Что не очень удобно, так как время хода до заданной точки сильно возрастает.
Просматривая различные рыболовные форумы и сообщества, обнаружил что я не одинок в данном вопросе. Проблем у этого водоплавающего дрона много, а достоверной информации по их решению, почти нет. Более того, много неправильных советов, которые вводят в заблуждение. Ну это простительно, ибо рыболовы-любители совсем не обязаны разбираться в электронике. Поэтому и решил написать, своего рода ликбез (или FAQ по современному). Итак
Навигационная система прикормочного кораблика
Несмотря на кажущуюся "игрушечность" кораблик имеет вполне себе серьёзную навигацию, на базе которой можно сделать серьёзный водный дрон.
Что из себя представляет электронная начинка. Размещена она в носовой части и приклеена на какой-то герметик к верхней крышке (палубе если хотите) корпуса.
Сверху (если крышка перевернута) находится основная плата управления, а под ней GPS модуль. Именно он отвечает за определение координат корабликом. Его антенна находится прямо на нем, на плате с противоположной стороны от нас.
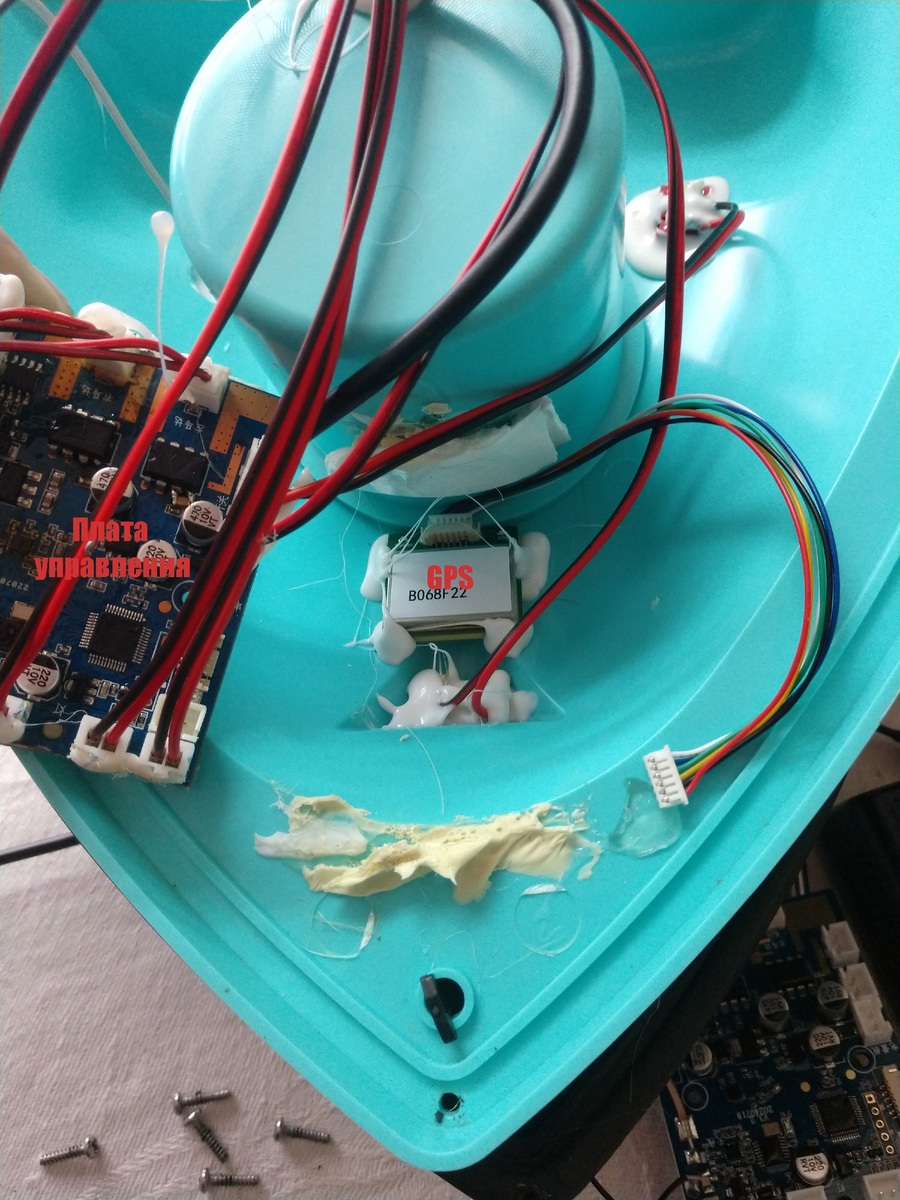
Если у вас кораблик не определяет координаты не нужно паять и менять антенну которая торчит из корпуса. И такие советы встречаются в сети. Та, которая торчит, отвечает за связь кораблика с пультом управления, о котором поговорим позже.
Когда GPS модуль работает нормально и определил координаты, светодиодные индикаторы на нем делают вот так - красный горит, а зеленый моргает раз в секунду. При этом, если подключен пульт ДУ, то на его экране вверху справа, отображается значок кораблика со шкалой.
Смею заметить, что GPS модуль должен работать независимо от того, подключен ли пульт, исправна ли основная плата. Если на него поступает питание (красный светодиод) и он исправен, то он должен определить координаты и замигать зеленым. Если он этого не делает, то его нужно менять. Но не спешите. Координаты могут вычисляться довольно долго, особенно "с нуля" на новой местности. На холодную, как говорят спецы. Кроме того, GPS могут глушить, особенно в наши дни. Так что в случае с GPS, как говорится - "сем раз отмерь, один раз отрежь". "Отмерять" нужно не в железобетонной квартире, а желательно под открытым небом. Или хотя бы на балконе.
С координатами разобрались. Координаты с GPS модуля передаются на плату управления, где на их основании и происходит выработка команд рулежки и остановки чтобы привести кораблик в заданную точку. При ручном управлении можно вполне обойтись без GPS, но зачем он важен даже в таком случае, объясню позже.
Но это ещё не всё. На плате управления есть ещё один навигационный сенсор - магнитный компас
Вот этот маленький "жучок" и есть датчик магнитного компаса.
Зачем датчик магнитного компаса кораблику.
Да затем же, зачем и круизному лайнеру, авианосцу и подводной лодке. Чтобы знать куда смотрит нос.
"Есть же GPS", скажет пытливый читатель. Есть, но по координатам можно определить направление только во время движения, то есть при изменении этих координат. Причем это будет с запозданием и придется всё время подруливать, корректируя курс, а по компасу система мгновенно чувствует все отклонения и тут же корректирует движение в направлении заданной точки.
Перед каждой рыбалкой рекомендуется делать калибровку кораблика. Это когда он самостоятельно выписывает "восьмерку". Во время этих маневров и калибруется датчик магнитного компаса. Не GPS, как многие считают. GPS вообще никак не калибруется.
Проверить работу магнитного компаса очень легко, даже не выходя из дома. На пульте есть индикатор который отображает направление носа кораблика. Репитер, по морской терминологии. Можно покрутить кораблик туда-сюда и на индикаторе должны отображаться эти движения. Там, правда, всего 4 положения, север-запад-юг-восток, , но для проверки этого достаточно.
Но опять же, есть нюанс. В моей ситуации компас работал как положено при выключенных электромоторах, но стоило дать ход, как индикатор "замирал" в одном положении. Соответственно, калибровку он пройти не мог и бегал по кругу в ожидании когда же измениться курс. Сначала я думал, что проблема в помехах по питанию от электромоторов. Навешал везде конденсаторов, в том числе керамики и пленочных, но эффекта это не дало. Проверял осциллографом питание - всё чисто. заменил саму микросхему магнитного компаса. Ничего не изменилось. Сделал вывод, что проблема в ПО (прошивке) платы. В итоге просто заменил плату управления и всё стало нормально.
Почему сразу так не сделал? В начале моей эпопеи платы стоили недешево и была целесообразность отремонтировать на компонентном уровне. А потом они вообще исчезли. И вдруг снова появились на алике, по довольно низкой цене.
Поэтому просто купил и заменил, чего и всем советую, кто столкнулся с проблемами. Главное определить, что проблема именно в этой плате, для чего и пишу такой подробный разбор.
Замена платы управления. Нюансы.
Новая плата управления немного отличается от родной. Главное отличие, это дополнительная антенна для связи с пультом в виде небольшой печатной платы с двухсторонним скотчем. Эта антенна на частоту 2.4 ГГц. Основная, "уличная", на 433 МГц. Если вы не планируете менять пульт, то эта новая антенна вам не понадобится. Но и удалять её тоже не нужно, просто пусть лежит в корпусе, есть не просит. Встречал заблуждение, что она якобы увеличивает радиус действия. Если у вас пульт не поддерживает такую частоту, то никоим образом.
Плату нужно установить и зафиксировать как можно точнее относительно продольной оси корпуса. На ней всё таки датчик компаса и относительно его положения рассчитывается навигация. Я "притяпал" на автомобильный герметик. Держит надежно.
Ещё один монтажный нюанс - разъем родной антенны так надежно приделан к корпусу, что переделывать это никак не хочется. Поэтому отпаиваем антенный коаксиальный кабель от родной платы, отпаиваем антенный кабель от новой платы и припаиваем старый кабель к новой плате.
Вроде всё просто, но кабель очень тонкий, поэтому важно не перегреть изоляцию между оплеткой и центральной жилой, а то замкнет и антенна работать не будет. Я делал это в деревенских условиях и под рукой был только ЭПСН-25. Честно говоря, боялся накосячить ибо привык уже к более современному инструменту. Но руки то помнят! Всё получилось.
После замены платы нужно сделать привязку пульта. Это по инструкции, тут дублировать не буду.
Разные заблуждения по поводу эксплуатации, которые я нашел в сети
Кораблик не следует ровным курсом - рыскает и виляет. Нужно смазать сальники электродвигателей.
Вот так устроена пропульсивная установка (это по научному) этого судна. Два коллекторных электродвигателя в корпусе..
И винты снаружи
Руля нет. Рулёжка происходит за счет изменения тяги электромоторов.
Машина любит смазку, чистоту и ласку. Тут я спорить не буду, смазка лишней не будет. Сам следуя эти советам всё перемазал самыми лучшими смазками, аж с судостроительных производств. Но ... не помогает. А моторы менял? А винты? Нет, до винтов и моторов слава Богу руки не дошли. Да и как электронщик, я понимаю, что идеально одинаковой тяги во все моменты времени от двух движителей не добиться, сколько не маж и не подбирай китайские двигатели по параметрам. В данном случае, всем рулит электроника. Как только почувствовала отклонение от курса, тут же один движок приглушается и курс выравнивается и так в режиме реального времени, не заметно для глаза наблюдателя кораблик следует заданным курсом. Одинаковость тут совсем не нужна. Так что, если у вас не держит курс ищите проблему в электронике. Ну за исключением случаев, если движку совсем капец, или у винта лопасти загнулись.
Кораблик возвращается в домашнюю точку по дуге, а не по прямой
Это нормально. Это так и заложено в алгоритм, на случай, чтоб он в снасти не запутался, которую только что завез. Вдруг леска на поверхности будет. Так что не боритесь с этим, если не нравится плывите в ручном режиме.
Про домашнюю точку
Рекомендуется первым делом перед началом рыбалки на водоеме забить в память кораблика домашнюю точку. Это по аналогии с воздушными дронами, то место куда он будет возвращаться в случае потери связи с пультом. А она у воды, поверьте, может случится очень легко. Например, пульт в воду уронили. Нее, не вы, пьяный товарищ конечно. Или внезапно дождь пошел и пульт отказал.. Ну может же так быть? И тю-тю, прощай кораблик. Вот для этого и нужен GPS, о чём я упоминал в начале. Даже если вы не планируете "забивать" точки для рыбалки, а все делете в ручном режиме, GPS нужен чтоб в случае аварии кораблик вернулся домой.
Поэтому, первым делом (после калибровки) ставите кораблик у берега, в то место куда хотите чтоб он вернулся, чтоб можно было достать рукой в любом состоянии (ну на рыбалке же..) и заносите в память по инструкции (инструкцию цитировать не буду) эту точку как домашнюю. Но есть нюанс.
В сети куча инструкций по этому поводу и в большинстве из них указывается, что домашняя точка должна записываться в ячейку под номером 4. Я так и сделал первый раз и чуть не потерял кораблик. Занес в ячейку 4 точку у берега и погнал куда подальше в надежде, что он вернется когда связь с пультом закончится. Связь закончилась, а он встал и не шелохнется. Хорошо течение было ко мне, его поднесло в радиус действия связи и я его пригнал в ручном режиме. А если б отнесло дальше...
Оказывается в моей версии домашняя точка должна быть записана в ячейку номер 1, что более логично. И отображаться это должно в верхней части дисплея. Если там у вас ничего не отображается, значит домашняя точка не установлена.
Так что если вы не знаете, какая версия у вас, проверьте безопасно. Выставьте "дом", затем отплывите немного на безопасное расстояние, например вдоль берега, чтоб если что, можно было достать кораблик и выключите пульт. Через пару минут кораблик должен самостоятельно отправится в "дом", если всё работает правильно.
Отображаемое на пульте расстояние
Число на пульте показывающее расстояние до кораблика, на самом деле показывает расстояние не между корабликом и пультом, а между корабликом и домашней точкой. Это нужно учитывать, когда домашняя точка находится не рядом с вами. Вот, для примера, на дисплее 999 метра, а кораблик рядом с пультом.
999 метров это максимальное расстояние, которое может быть отображено на дисплее. На самом деле, точка находится на рыбалке, до которой несколько километров. А вообще, рекомендуется после каждой рыбалки очищать память кораблика от точек. Иначе его мозг может "сойти с ума" если вы включите его на каком-то расстоянии от последнего места рыбалки, а ему по алгоритму нужно как-то вернутся туда, где ему задан "дом". Возможно, в новых версиях предусмотрены такие ситуации, а вот в старых есть явные проблемы.
Кстати, мой держит связь с пультом на 300 метров без всяких доработок. Вполне хватает для обычной рыбалки.
Заключение
Вроде много написал, но ещё не всё. В процессе эксплуатации ещё много мыслей будет, значит будет продолжение. Старался писать терминами, понятным для широкого круга. Если где не понятно, пните.
Основное применение кораблика на рыбалке, это завоз прикорма при ловле карпа и подобных рыб. Его второе название "карповый кораблик". У нас на севере таких рыб нет и ни кто его не использует. По крайней мере я не знаю и не видел ни одного пользователя. Это мне уж шибко захотелось поиграться, в детстве любил разные судомодели конструировать. Можно, конечно, леща на фидер половить, но он и без корабликов неплохо ловится. А я придумал ему свое применение - завозить донку с живцом. Кто хоть раз пробовал закинуть, знает как это проблематично. А на кораблике без проблем.
Всем пока.
Ни хвоста, ни чешуи!
Понравилась эта статья?, автору будет приятно получить в знак благодарности небольшой донатик на чай (или пивко :) ----> Отблагодарить