Учёные из Университета Бристоля представили новую систему телеуправления для сбора лунной пыли, которая может стать ключевым инструментом для будущих лунных миссий. Система позволяет операторам управлять роботом, собирающим образцы лунного реголита, используя виртуальную симуляцию, которая затем отправляет команды физическому роботу.
Это позволяет операторам управлять роботом, не имея прямого доступа к лунной поверхности, что особенно важно для будущих лунных миссий, когда операторы будут находиться на Земле, а роботы будут работать на Луне.
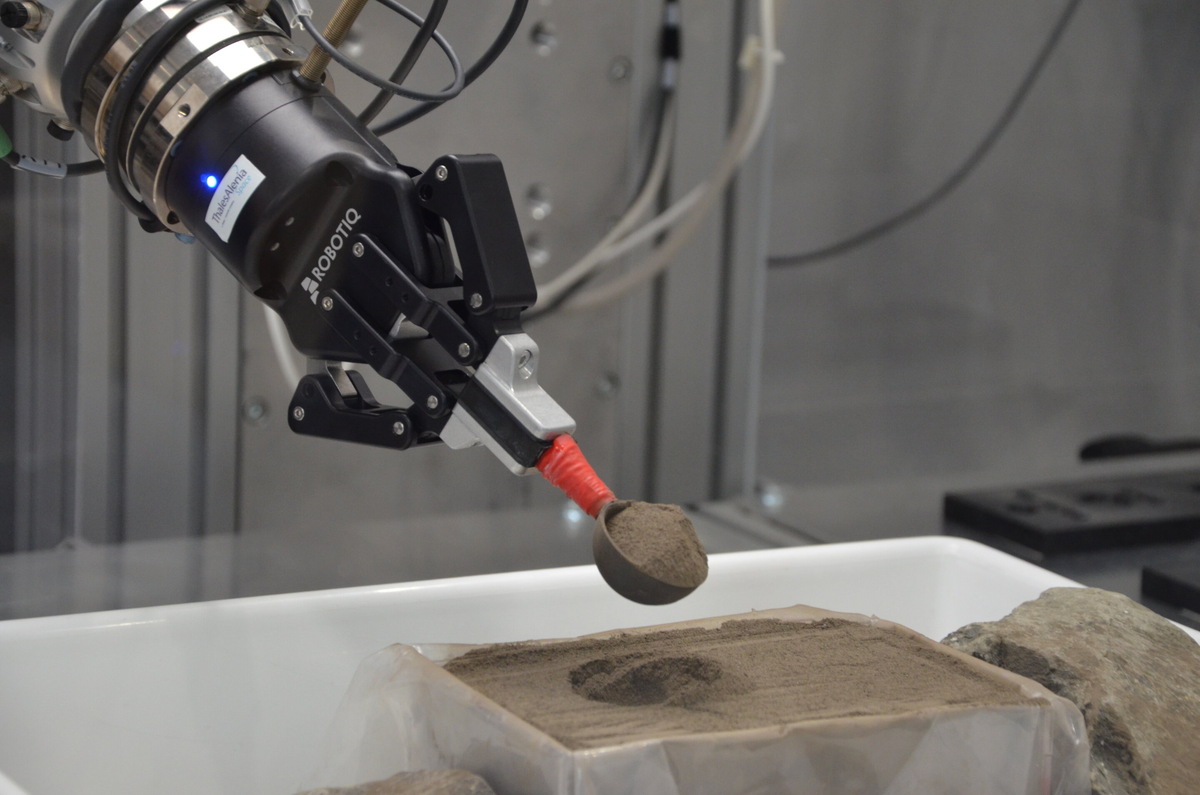
Система телеуправления была разработана командой учёных из Бристольской школы инженерной математики и технологий и Бристольской лаборатории робототехники. Она позволяет операторам управлять роботом, собирающим образцы лунного реголита, используя виртуальную симуляцию. Симуляция создает виртуальную модель лунной поверхности, на которой робот может перемещаться и собирать образцы. Оператор может управлять роботом, используя виртуальную модель, и отправлять команды физическому роботу, который затем выполняет действия на лунной поверхности.
Испытания системы показали, что она работает эффективно и может быть использована для будущих лунных миссий. Система была протестирована на площадке Европейского центра космических приложений и телекоммуникаций Европейского космического агентства в Харвелле. Учёные планируют продолжить разработку системы телеуправления и использовать её для будущих лунных миссий. Они также планируют исследовать, как люди взаимодействуют с этой системой, управляя роботом, с задержкой в несколько секунд.

«Новая система телеуправления является важным шагом к будущим лунным миссиям. Мы можем использовать эту систему для подготовки астронавтов к будущим миссиям и для управления роботами на Луне», — сказал Джо Лука, ведущий автор исследования.
Эта система является частью более широкой программы исследований лунной пыли и реголита. Лунная пыль является ценным ресурсом для будущих лунных миссий, и её сбор является ключевым шагом к использованию ресурсов Луны. В следующем десятилетии запланировано несколько пилотируемых и беспилотных миссий на Луну, таких как программа NASA «Артемида» и китайская программа «Чанъэ». Данная симуляция может стать ценным инструментом для поддержки подготовки или проведения таких миссий.