
Дисклеймер
На идею создания данного проекта меня подтолкнул широко известный в узких кругах самодельщик AlexGuiver (большое ему за это спасибо от всех котиков). Александр уже делал 2 вида кормушек. К сожалению они оба имеют, мягко говоря, "не товарный вид" и ставить такое дома не хотелось, что-бы не портить убранство домашнего интерьера. Было решено спроектировать более "красивую" версию, а что из этого вышло смотрите ниже ;)
Все исходные файлы, включая модели и прошивку, лежат на GitHub
Особенности этой кормушки:
Для работы кормушки необходим обычный блок питания 5V. Ток не менее 2A (лучше 3A);Кормушку можно запитать от обычного павербанка;В кормушке применен модуль часов реального времени, это позволяет не переживать за возможные перебои с электричеством; В режиме ожидания кормушка показывает текущее время; Программа позволяет настраивать до 7 сеансов кормления в сутки (без перепрошивки контроллера); Вы сможете настроить время и количество корма для каждого сеанса; Настройки сохраняются в энергонезависимой памяти; При отсутствии электричества в момент очередного сеанса кормления, этот сеанс пропускается. При восстановлении электричества кормушка продолжит свою работу; Детали оптимизированы под печать PETG пластиком на FDM принтере с областью печати 200х200х200мм; Предусмотрено крепление кормушки на стену.
Порядок сборки:
Рекомендую с начала полностью прочитать статью и только после этого приступать к сборке.
Электронная часть
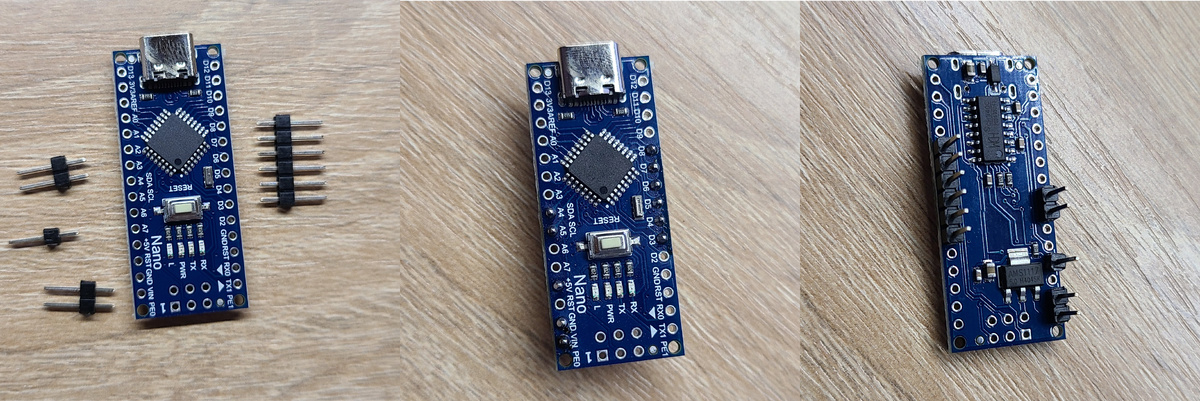
Подготовьте следующий список необходимых компонентов:Повышающий DC-DC модуль XL6009;Модуль часов реального времени DS3231;Arduino nano;Шаговый двигатель 17HS4401 (или аналог. Высота корпуса двигателя не должна превышать 42мм, иначе он не залезет в корпус);Драйвер шагового двигателя A4988 (использование тихих драйверов типа TMC пойдет во вред, т.к. дополнительные вибрации во время работы двигателя помогают подаче корма);I2C OLED 0.96" дисплей 128x64;Модуль поворотного энкодера HW-040 (KY-040);Макетная плата 5x7cm;Электролитический конденсатор 16В 100uF;Гнездо type-c;Соединительные провода.Залейте на Arduino nano прошивку из папки Arduino/catFeeder;Распаяйте контакты на arduino nano так как показано на фото ниже;
Настройте выходное напряжение на модуле XL6009 равное 12В; Распаяйте все компоненты на макетной плате так как показано на фото ниже;
Соедините все контакты компонентов дорожками в соответствии с картинкой ниже. Установите модуль часов реального времени DS3231 и драйвер шагового двигателя A4988;
Подключите питание к контактам IN+/IN- модуля XL6009 и настройте ток на драйвере шагового двигателя равным 0,5А (Vref = 0.4В). Большой крутящий момент в данном проекте не требуется, алгоритм вращения фидерного колеса позволяет справляться с закусыванием корма при подаче. !!! Внимание !!! не используйте в качестве источника питания USB порт компьютера, он не сможет выдать необходимый ток; Подключите дисплей, энкодер и шаговый двигатель; Проверьте работоспособность собранной платы.
Механическая часть
Распечатайте все детали из папки 3DModels/STL. Если необходимо внести изменения, в папке 3DModels есть исходные файлы для SOLIDWORKS 2018; Соедините детали корпуса как показано на фото 1 и 2 ниже. Если необходимо увеличить объем бака с кормом, вы можете еще раз распечатать деталь "L.013.00.00.04 Tank" и установить ее (фото 3).
Скрепите детали крышки, используя 2 кусочка филамента длинной 17,5мм и диаметром 1,75мм;
Установите крышку на корпус;
Возьмите 4 винта M3x10 и закрепите ими шаговый двигатель 17HS4401. Установите фидерное колесо на шток двигателя. Колесо должно плотно сидеть на валу исключая прокручивание;
Установите гнездо type-c в нижнюю часть корпуса и припаяйте провода к контактам IN+/IN- модуля XL6009;
С помощью термоклея закрепите на верхней части корпуса, дисплей и энкодер. Рекомендую предварительно припаять соединительные провода к контактам;
Подключите шаговый двигатель, энкодер и дисплей к плате управления. Установите плату управления в специальные пазы внутри нижней части корпуса. Подключите питание и проверьте работоспособность;
Используя саморезы 3,5х25 скрепите между собой верхнюю и нижнюю части корпуса, саморезы устанавливайте через отверстия в дне нижней части корпуса;
Повторно проверьте работоспособность. Поздравляю, сборка завершена!
Все исходные файлы, включая модели и прошивку, лежат на GitHub. А вот так это все работает