Сервоприводы на FPV-дронах могут быть интегрированы в систему управления для выполнения определенных задач, таких как изменение угла обзора камеры в зависимости от условий полета, управлением сбросами и аэродинамическими элементами.
Возможность регулировки параметров полета и дополнительных устройств в реальном времени позволяет пилоту адаптироваться к различным условиям и задачам, что делает полеты более эффективными.
Попробуем подключить крепление для поворота камеры управляемое сервоприводом.
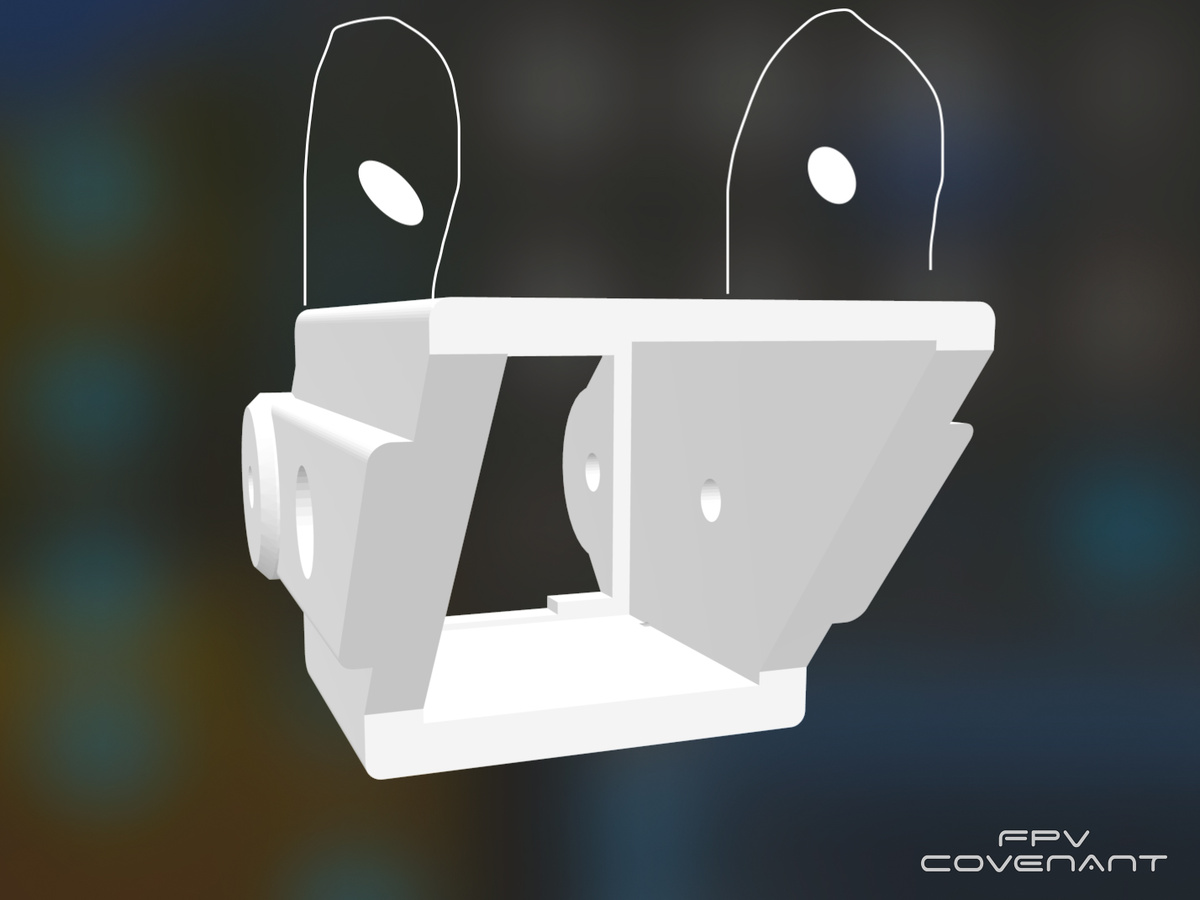
В открытых источниках можно найти большое количество готовых моделей для поворота камеры. Например модель для рамы Apex и Маrк 4.
Для нашей задачи была разработанна модель крепления для двух камер (Обычной и тепловизора) на раму гадюка 7.

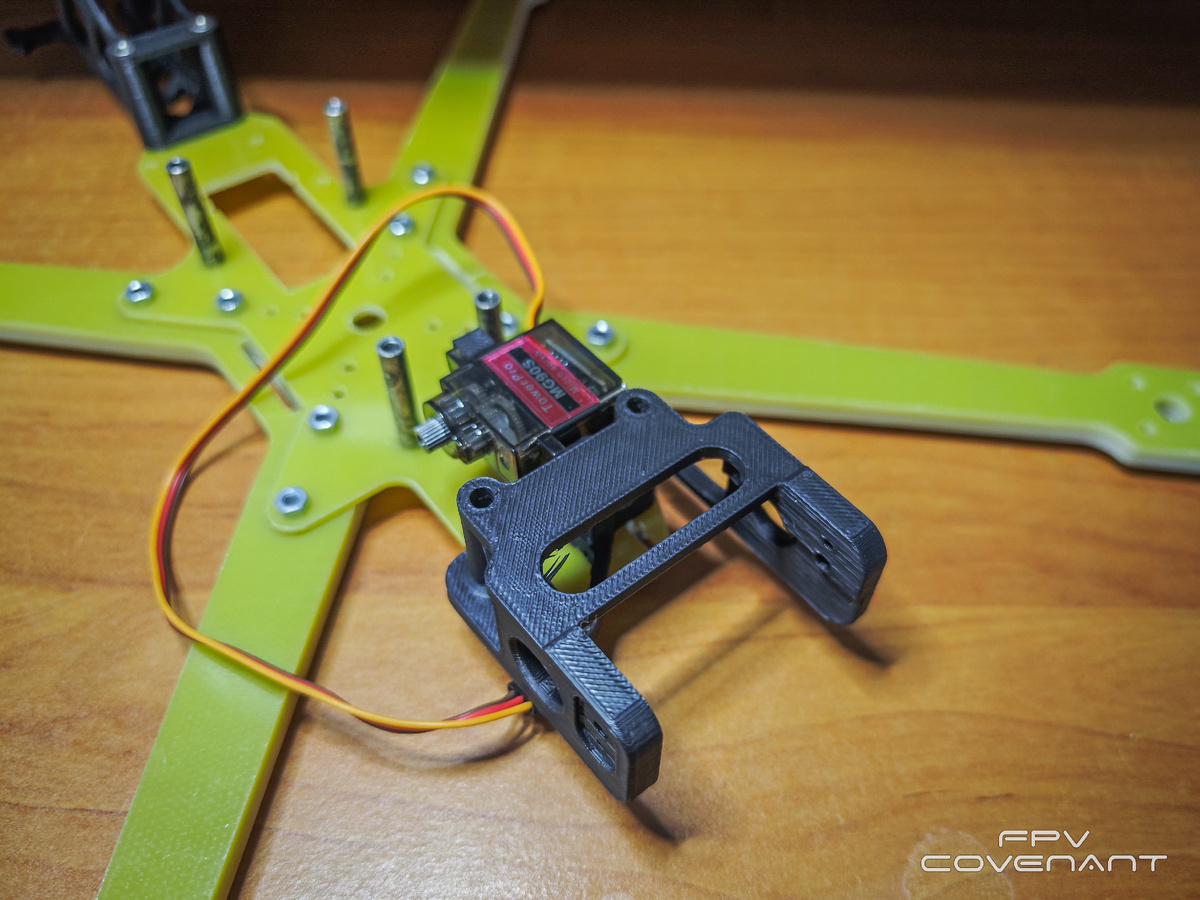
Подключим сервопривод к полетному контроллеру и попробуем модель в работе.
Подключение сервопривода к полетному контроллеру FPV дрона
Для изменения положения подвижных частей в FPV дроне используется сервопривод, от которого отходит три провода: красный, желтый и коричневый.
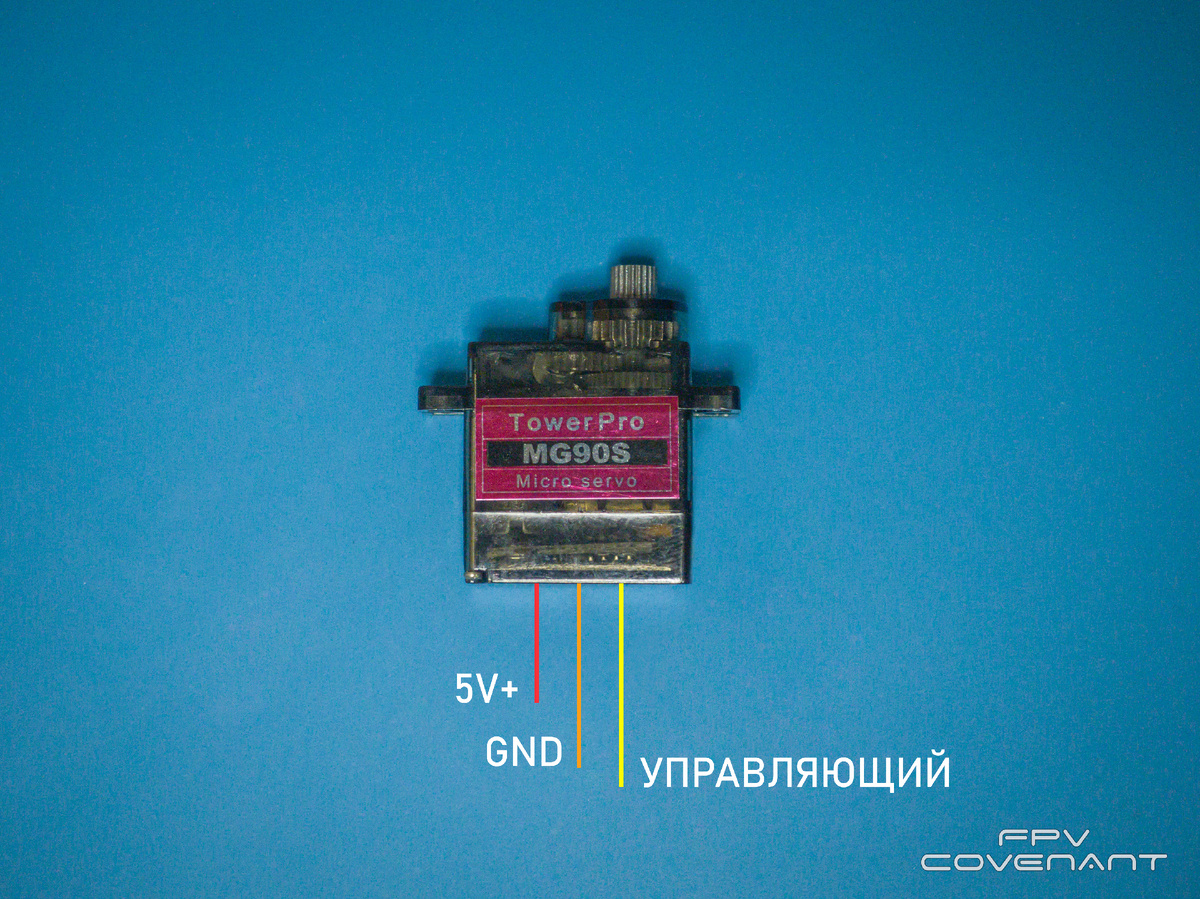
красный провод - плюс питания;
коричневый - минус питания;
жёлтый - управляющий сигнал.
Для работы сервопривода необходимо все три провода припаять к полетному контроллеру.
Коричневый провод сервопривода подпаиваем к любой свободной площадке - GND, красный к - 5V, желтый на любую из площадок для моторов M5-M8, или S5-S8, или LED.
Настройка сервопривода FPV дрона в Betaflight Configurator
Для корректной работы сервопривода необходимо произвести соответствующие настройки в программе Betaflight Configurator. Для начала подключаем дрон, запускаем приложение и подключаемся к полетному контроллеру.
Переходим во вкладку «Конфигурация» и включаем SERVO_TILT. После этого обязательно нажимаем на кнопку «Сохранить» в правом нижнем углу.
Далее переходим во вкладку «Командная строка» и делаем резервную копию всех настроек дрона. Для этого вводим команду diff или diff all, если есть несколько pid-профилей) и нажмаем «enter» на клавиатуре и нажимаем кнопку сохранить в файл.
Вводим в командную строку команду resource и нажмаем «enter» для того, чтобы посмотреть название того пина (площадки), к которому припаян сигнальный (желтый) провод сервопривода. В нашем примере мы припаяли желтый провод к площадке пятого мотора «М5». Названием пина для этой площадки является «B00».
Далее освободим наш пин для сервопривода вводом в командную строку следующей команды: resource MOTOR 5 none и назначим освобождённому пину сервопривод следующей командой: resource SERVO 1 B00. В завершении сохраняем все изменения вводом команды save.
Далее нам требуется настроить пульт для работы с сервоприводом. Перезагружаем полетный контроллер и подключаем пульт управления.
Настройка сервопривода FPV дрона на пульте управления Radiomaster TX12
Для управлением сервоприводом нам требуется определить тумблер. В нашем случае мы попробуем запрограмировать трехпозиционный переключатель на пульте - C. Переходим во вкладку «Приёмник». Изменяя положение выбранного переключателя на пульте, мы видим изменения в одном из отображаемых в программе AUX. В нашем случае это AUX4.
Переходим во вкладку сервоприводы и в строке SERVO1 ставим галочку у A4 (AUX4). Таким образом мы запрограмировали наш переключатель на управление сервоприводом.
Сохраняем и перезагружаем наш FPV дрон. Подключаем пульт и попробуем переключить трехпозиционный тумблер. Как мы видим все прекрасно работает.
На этом можно было остановиться, но захотелось попробовать регулировать камеру боковой крутилкой S2 на пульте.
Включаем пульт и заходим и нажимаем MDL. Входим в настройки нашей модели.
Заходим во вкладку MIXES и выбираем 12 канал. Редактируем его настройки функцией EDIT.
Выбираем функцию Source и пока будет мигать выбор - крутим на пульте крутилкой. Автоматически назначится наш переключатель.
Заходим снова в Betaflight Configurator и переходим во вкладку «Приёмник». Изменяя положение боковой крутилки на пульте, мы видим изменения в одном из отображаемых в программе AUX. В нашем случае это AUX8. Переходим во вкладку сервоприводы и в строке SERVO1 ставим галочку у A8 (AUX8). Таким образом мы запрограммировали нашу боковую крутилку на управление сервоприводом.
Сохраняем и перезагружаем дрон. Подключаемся к пульту и попробуем работу бокового переключателя.
Умение использовать сервоприводы на FPV-дроне значительно расширяет функционал. Следующим шагом в развитии этого проекта мы попробуем подключить одновременно две камеры.