Швейцарские инженеры из Высшей технической школы Лозанны (EPFL) совершили прорыв в области робототехники, создав Handcrawler — робота с уникальной отсоединяемой рукой. Вместо того чтобы копировать человеческие способности, которые имеют ряд ограничений, они решили наделить робота новой функциональностью. Недавняя демонстрация на Международной конференции IEEE по робототехнике и автоматизации в Роттердаме показала, как захват робота, выполненная в форме пятипалой руки, может отсоединяться от манипулятора Kuka, самостоятельно перемещаться и возвращаться на место.
Двусторонняя конструкция захвата позволяет ему брать предметы с любой стороны без поворота «запястья», а способность к самостоятельному передвижению значительно расширяет рабочую зону робота. Например, если объект находится вне досягаемости манипулятора, захват может отсоединиться, «доползти» до него, захватить и вернуться обратно для повторного присоединения. Передвижение осуществляется за счёт вытягивания среднего пальца и последовательного переставления остальных, подобно шагам.
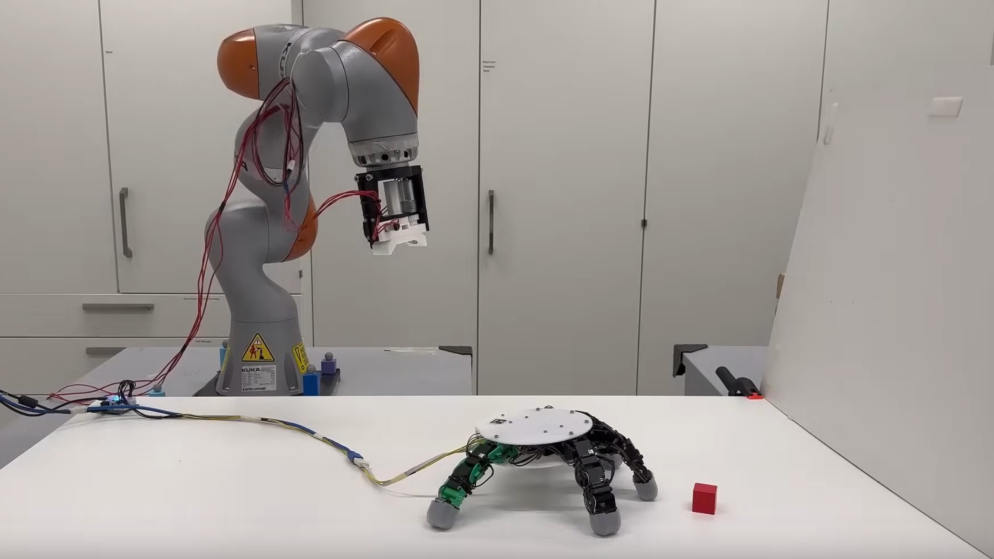
Видеодемонстрация "За пределами ручной ловкости" наглядно иллюстрирует этот процесс. Handcrawler сначала манипулирует предметами в пределах досягаемости, демонстрируя, как он может переворачивать бутылку, имитируя добавление соуса. Затем, чтобы достать небольшой кубик, расположенный слишком далеко, захват отсоединяется и самостоятельно перемещается к нему. После захвата кубика он возвращается к манипулятору, который под управлением оператора выравнивается для стыковки.
В настоящее время управление роботом осуществляется дистанционно, но разработчики уже работают над автономной версией с внешней системой локализации. Инновационность Handcrawler заключается в объединении функций захвата и передвижения в одном модуле. Большинство роботов имеют отдельные системы для этих задач. Хотя практическое применение отсоединяющейся руки трудно представляется, Handcrawler демонстрирует потенциал нестандартных решений в робототехнике и доказывает, что отказ от слепого копирования человеческой анатомии может привести к новым технологическим прорывам. Этот эксперимент открывает путь для переосмысления принципов робототехнической ловкости и расширения возможностей роботов будущего.


















