Бывают задачи, когда нужно последовательно подвигать механизм вверх-вниз или влево-вправо (Например механизм протруски в прессе). Или движения тележки. В LD программе есть научное название такой схемы - называется мультивибратор. Реализация для ПЛК Delta. Ставим два таймера, один с замкнутым выходом, другой с разомкнутым. Данный пример отображает работу гидравлического механизма с двумя катушками Y21 и Y22. В параметре D2001 выставляете необходимую задержку времени. Этот же параметр можно вывести на панель оператора, любую, где есть драйвер этого ПЛК. Если будут вопросы, пишите.
Бывают задачи, когда нужно последовательно подвигать механизм вверх-вниз или влево-вправо (Например механизм протруски в прессе). Или движения тележки.
В LD программе есть научное название такой схемы - называется мультивибратор.
Реализация для ПЛК Delta.
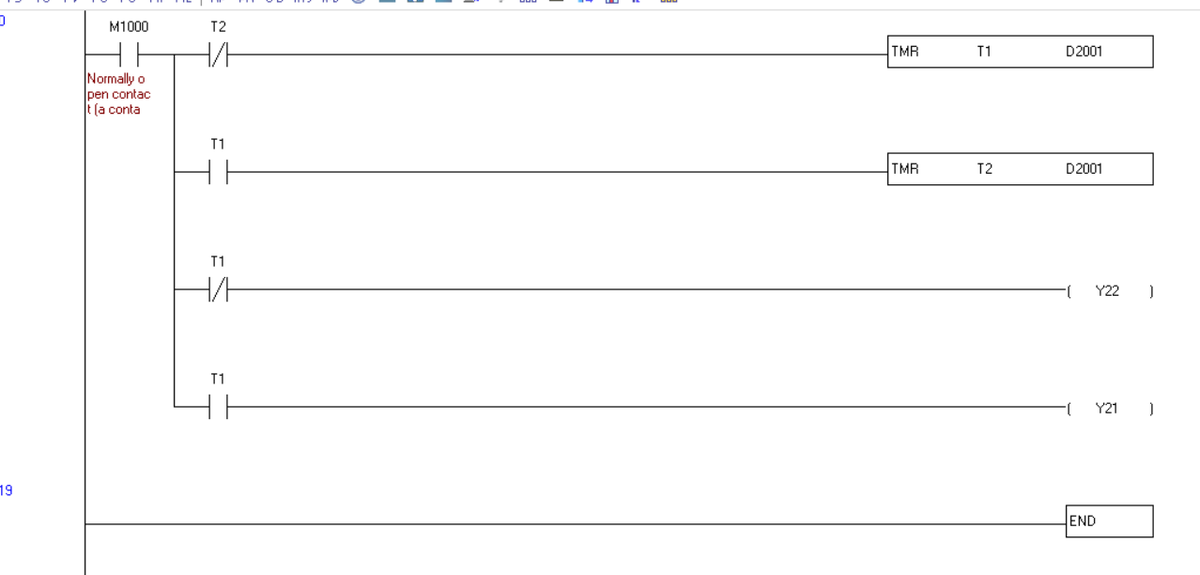
Ставим два таймера, один с замкнутым выходом, другой с разомкнутым. Данный пример отображает работу гидравлического механизма с двумя катушками Y21 и Y22.

В параметре D2001 выставляете необходимую задержку времени. Этот же параметр можно вывести на панель оператора, любую, где есть драйвер этого ПЛК.
Если будут вопросы, пишите.