Ученые из Института интеллектуальных систем Макса Планка (MPI-IS) разработали роботизированные компоненты в форме шестиугольника, называемые модулями, которые можно собирать по принципу LEGO в высокоскоростных роботов, которые можно перестраивать для различных возможностей.
Команда исследователей из отдела робототехнических материалов MPI-IS под руководством Кристофа Кеплингера интегрировала искусственные мышцы в шестиугольные экзоскелеты, в которые встроены магниты, обеспечивающие быстрое механическое и электрическое соединение.
Работа команды "Гексагональные электрогидравлические модули для быстро реконфигурируемых высокоскоростных роботов" была опубликована в Science Robotics 18 сентября 2024 года.
Шесть легких жестких пластин, изготовленных из стекловолокна, служат экзоскелетом каждого модуля HEXEL. Внутренние соединения шестиугольников приводятся в действие искусственными мышцами с гидравлическим усилением самовосстанавливающегося электростатического тока.
Подача высокого напряжения на модуль приводит к активации мышц, вращению суставов шестиугольника и изменению его формы с длинной и узкой на широкую и плоскую.
"Сочетание мягких и жестких компонентов таким образом обеспечивает высокие гребки и скорость. Соединив несколько модулей, мы можем создавать новые геометрии роботов и перепрофилировать их для меняющихся потребностей ", - говорит Эллен Рамли, приглашенный исследователь из Университета Колорадо в Боулдере.
Она и Захари Йодер, оба аспиранты, работающие в отделе материалов для роботов, являются соавторами публикации.

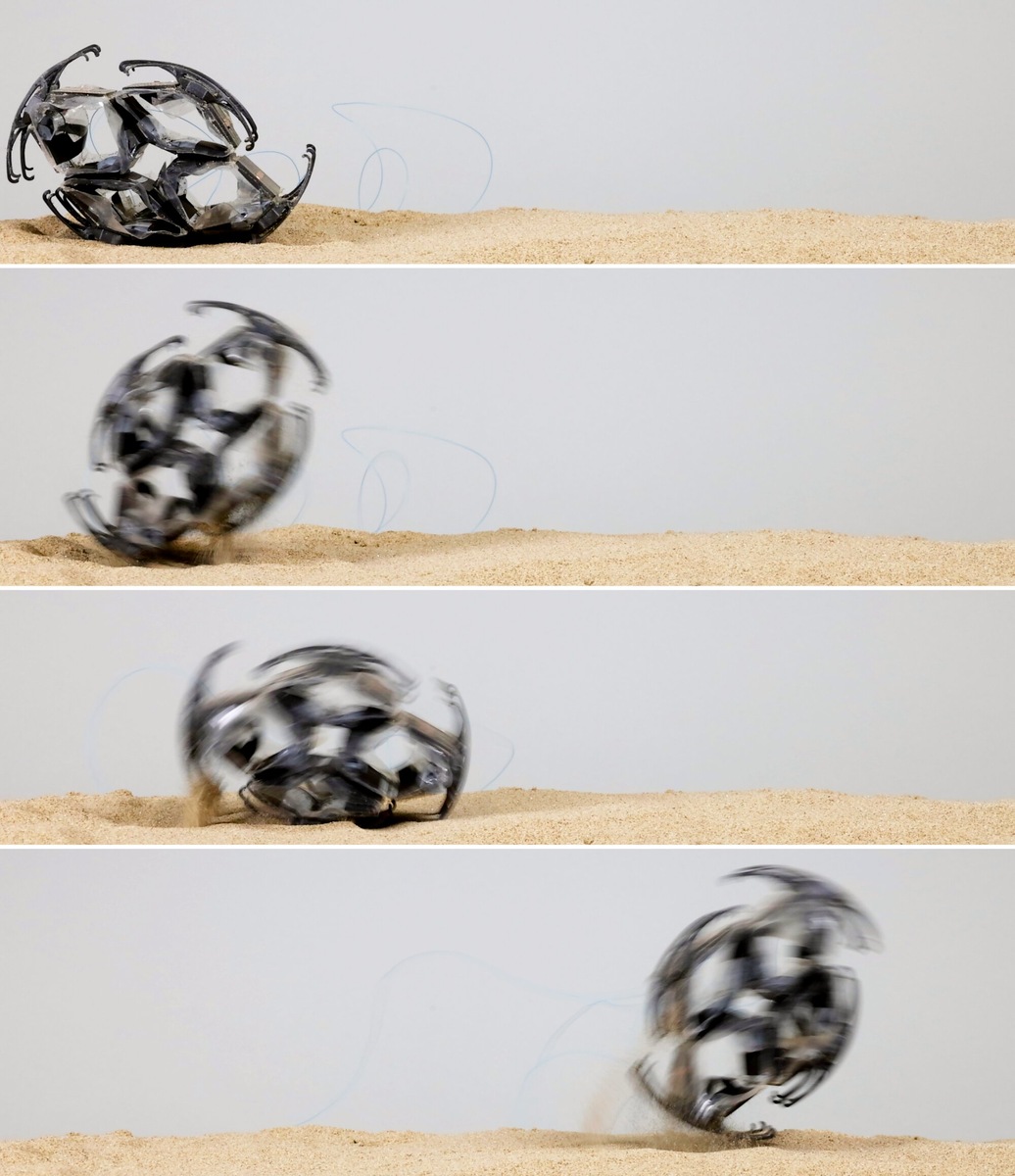

Команда демонстрирует множество вариантов поведения, которые можно создать с помощью модулей HEXEL. Группа модулей проползает через узкую щель, в то время как один модуль приводится в действие так быстро, что может подпрыгнуть в воздух. Несколько модулей соединены в более крупные конструкции, которые производят различные движения в зависимости от способа крепления модулей. Например, команда объединила несколько модулей в робота, который быстро катается.
"В целом, имеет большой смысл разрабатывать роботов с реконфигурируемыми возможностями. Это рациональный вариант дизайна — вместо покупки пяти разных роботов для пяти разных целей мы можем построить множество разных роботов, используя одни и те же компоненты. Роботов, изготовленных из реконфигурируемых модулей, можно перестраивать по требованию, чтобы обеспечить большую универсальность, чем специализированные системы, что может быть полезно в условиях ограниченных ресурсов ", - заключает Йодер.