
Всё началось в начале 90-х годов молодые сотрудники Института автоматики и электрометрии Борис Мазурок, Вячеслав Радченко и Руслан Великохатный были приглашены на международную конференцию по машинной графике ГрафиКон-91 которая тогда проходила в Москве и там были представители молодой на тот момент студии Pixar. И они там показали свой 2-х минутный короткометражный компьютерный мультфильм Люксо младший который они создали ещё в 1986 году. И их так вдохновил этот мультик, что по возвращении в Новосибирск они подумали и решили, а не сделать ли им тоже 2-х минутный компьютерный мультик на компьютерном тренажере для космонавтов, который они разрабатывали в институте и в итоге получился фильм SHADOW (Тень)
SHADOW 1991
За основу они взяли сюжет из их старого рисованного мультфильма Тень, где человечек входит в собственную тень (Да они и до этого занимались мультипликацией только рисованной) На создание ушло где-то 6 месяцев.
В 2016 году мультфильм был восстановлен одним из сотрудников студии Альбатрос Борисом Мазурком так как сохранились исходники мультфильма.
Сделали и послали на международный конкурс PRIX ARS ELECTRONICA. Фильм вошел в 10-ку лучших фильмов ARS ELECTRONICA-91ONICA PRIX это первый советский компьютерный мультфильм.
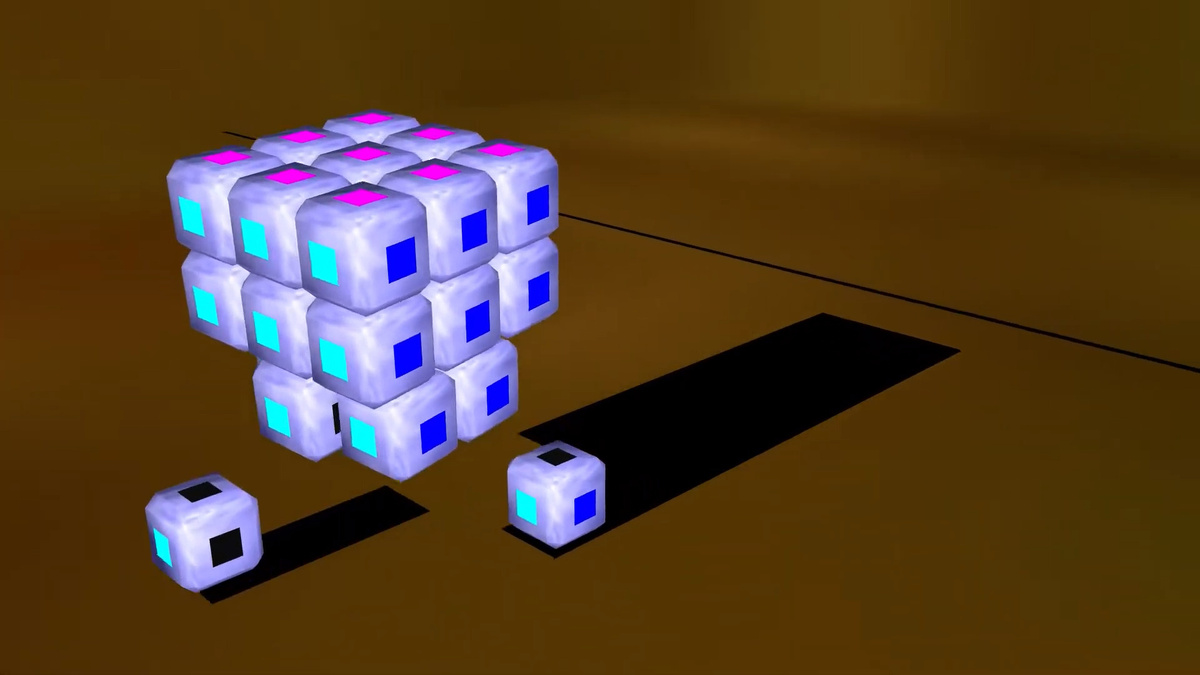
«Фильм «Тень» создан рабочей группой (Борис Мазурок, Сергей Минаев, Александр Черепанов) под моим руководством со специализированной системой 3D-визуализации «Альбатрос», основной задачей которой является подготовка космонавтов и пилотов. Система «Альбатрос» разработана в Институте автоматики и электрометрии Сибирского отделения СО РАН СССР. Использование систем реального времени открывает новые возможности в анимации. В отличие от систем, описывающих динамику движения только с помощью анимированных проволочных каркасов, системы реального времени позволяют художнику работать над фильмом в интерактивном режиме. Психология персонажа может быть развита так же точно, как и постановка сцены, система позволяет осуществлять динамическое редактирование цвета. Более того, создание анимации в реальном времени не требует покадровых видеомагнитофонов, поэтому это и значительно дешевле, и быстрее. Условность персонажа и простые 3D-трансформации пространства делают фильм немного эклектичным, но, тем не менее, он сохраняет черты детектива. Интересно, что характер главного героя определяется только движением 27 кубиков и звуковым сопровождением. Эти художественные средства были выбраны не случайно. Они отражают специфику анимации в реальном времени, то есть сравнительно простое изображение и в то же время психологически сложное описание персонажа». (Долговесов Борис Степанович )
Как была восстановлена Тень?
Как-то раз Борису Мазурку пришла в голову идея - не переснять ли первый мультик Тень заново, в HD качестве. К счастью, сохранились 3D модели и анимация. Проблема в том, что просто так открыть эти модели на современном компьютере в современной программе не так-то просто. 3D модели были закодированы в специальном формате, который использовался в лаборатории в то время, и надо было как-то конвертировать их в современный 3D формат, например в FBX. Тогда он написал конвертер, загрузил в него исходники, получившуюся сцену открыл в 3D редакторе, наложил текстуры и отрендерил в Full HD качестве. Результирующий ролик выложил на своём Ютуб канале. Еще у него в планах рендерить мультик интерактивно прямо в интернет браузере, чтобы можно было крутиться вокруг.
Computer Stories 1992
Компьютерные истории представляют собой сборник из трёх сюжетов. Из их старых рисованных фильмов.
Миша. Первое Плавание 1993
Миша стал первым российским компьютерным CGI мультфильмом
В 1992 году у директора производственного предприятия "Миша" Евгения Полецкого появилась мысль отомстить Комитету по Рыболовству РФ за то, что они мешают ему ловить рыбу в Каспийском море. Рыбу перерабатывали в муку как кормовую добавку для птицефабрик. Месть заключалась в том чтобы сделать про Комитет по Рыболовству злобный мультик. Предприятие "Миша" олицетворяет медведь, а Комитет по Рыболовству - вредоносная акула, которая этому медведю постоянно мешает. Первоначальная версия была по простому озвучена композицией «Requiem» немецкой группы Mysterious Art, распространялась на лицензионных видеокассетах с мультсериалом «Ну, погоди!». Фильм был в прокате на Российском телевидении. (Борис Мазурок)
В 1995 году радиостанция Европа Плюс переозвучила Мишу
Подробнее о системе синтеза визуальной обстановки Альбатрос:
Из Научно-практического журнала Программные продукты и системы:
Базовый вариант системы "Альбатрос" , изготовленный в 1988 году, включает управляющую ЭВМ типа "Электроника-85", геометрический процессор (ГП) и видеопроцессор (ВП). Управляющая ЭВМ осуществляет формирование локальной базы данных, прием параметров положения наблюдателя от тренажерного комплекса, диспетчеризацию внешних событий (управление вводом/выводом, взаимодействие с оператором) и диагностику неисправностей системы.
Адаптер представляет собой интерфейс типа "окно", предназначенный для подключения системной шины к управляющей ЭВМ. В функции адаптера входят расширение адресного пространства управляющей ЭВМ, управление обменом информацией по системной шине и регистрация особых ситуаций. В системе предусмотрена возможность подключения к одной управляющей ЭВМ нескольких каналов, каждый из которых включает ГП и ВП с целью расширения угла обзора. Каждый канал подключается к системной шине с помощью типового интерфейса, осуществляющего дешифрирование адреса и маскирование сигналов ошибок. Для автономной настройки системы предусмотрен имитатор перемещений, который подключается к системной шине и позволяет задавать положение наблюдателя в трехмерном пространстве.
Геометрический процессор осуществляет просмотр базы данных, хранящейся в памяти (до 32 Мбайт), преобразование ее в систему координат наблюдателя, отбраковку объектов, не попавших в пирамиду видимости, преобразование объектов в экранную систему координат.
Кроме памяти баз данных, в ГП входит векторный процессор для преобразования объектов в систему координат наблюдателя. Он имеет пиковую производительность до 60 Мфлоп/с и включает блок обработки целых чисел и до шести блоков обработки 32-разрядных вещественных чисел. В ГП также входят клиппирующий процессор и форматер, преобразующий описание объектов из вещественного представления в форму, необходимую для ВП.
В ВП осуществляется преобразование объектов, заданных проекциями многоугольников на картинную плоскость, в телевизионный растр. ВП включает память кадра, конвейер однотипных клеточных процессоров, вычислитель цветовых компонент и видеопамять, хранящую 24-разрядный цвет RGB в каждом пикселе телевизионного кадра.
В системе реализовано разрешение 512x512 пикселей, и она может работать с мониторами прогрессивной и чересстрочной разверток. Одноканальная система генерирует в реальном времени до 4000 многоугольников в одном кадре или до 10000 огней. Время транспортной задержки не превышает 80 мс.
В системе предусмотрена защита от информационных перегрузок, позволяющая в зависимости от сложности отображаемой сцены переходить на разную частоту обновления в кадре. Максимальная частота обновления информации 50 Гц.
Система позволяет генерировать различные условия видимости (дневные, ночные, сумеречные), точечные источники света (огни, звезды), атмосферные явления типа дымки, тумана, округлые трехмерные объекты. Конструктивно система выполнена на многослойных печатных платах и занимает два крейта в типовой стойке. Высокое качество изображения достигается применением цифровой субпиксельной фильтрации (4x4 субпикселя на каждый пиксель) с оптимальной выборкой субпиксельной маски. Для устранения дефектов, связанных с чересстрочной разверткой, используется грубая фильтрация, когда значение цвета в пикселе определяется как средневзвешенное значение четырех соседних пикселей.
Следующая реализованная модель системы визуализации - "Альбатрос-Т", которая использует в качестве управляющей ЭВМ IBM PC/AT и позволяет в дополнение к имеющимся возможностям отображать текстурированные и полупрозрачные поверхности, что эффективно используется в системах визуализации для плавной смены уровней детализации обстановки. Система позволяет отображать до 32 текстурных карт размером 16x16 пикселей в реальном времени. Для этой цели разработан специализированный вычислитель в ВП базовой модели. На основе этой модели сделано несколько трехканальных систем визуализации с производительностью каждой до 12000 многоугольников в кадре при частоте смены кадров 25 Гц. Эти системы установлены в Центре подготовки космонавтов им. Ю.А. Гагарина для использования в различных типах тренажеров.
С целью расширения области применения систем визуализации, снижения их стоимости и улучшения эксплуатационных характеристик проведена работа по модернизации ГП базовой модели системы "Альбатрос" и создана еще одна разновидность системы - "Альбатрос-М", которая размещается в одном крейте. Производительность этой системы составляет 2000 многоугольников в кадре. Эта система также позволяет воспроизводить различные визуальные эффекты: дымку, туман, текстурированные и полупрозрачные поверхности.
В системе использована минимальная конфигурация как ГП, так и ВП, за счет чего удалось почти вдвое сократить объем оборудования. Заложенный в базовую конструкцию принцип модульности позволил создать эту модель с минимальными техническими доработками.
В ГП максимальный объем памяти баз данных сокращен по сравнению с базовой моделью до 8 Мбайт. Уменьшено количество блоков вещественной арифметики с шести до двух и выполнен ряд доработок для более эффективной реализации алгоритмов клиппирования и матричных преобразований. Минимизация оборудования ВП была достигнута снижением субпиксельного разрешения до 2x2, что приводит к незначительному ухудшению качества фильтрации изображений; вычисление цвета изображения происходит не в каждом пикселе, а в центре квадрата размером 2x2 пиксела.
Еще одна модификация ГП с использованием импортной элементной базы позволяет расширить ряд систем визуализации "Альбатрос" и снизить вдвое по сравнению с вариантом "Альбатрос-М" объем занимаемого системой оборудования. ВП в этой системе применяется тот же, что и в системе "Альбатрос-М". ГП выполнен с использованием микропроцессора Intel 860 XR и конструктивно оформлен как акселератор на плате, устанавливаемой в компьютер IBM PC/AT. Производительность системы с такими акселераторами составляет около 4000 многоугольников в кадре, что эквивалентно базовой модели семейства "Альбатрос". Объем оперативной внешней памяти для хранения баз данных и программ составляет 16 Мбайт. Пиковая производительность акселератора 66 Мфлоп/с. Предусмотрена возможность наращивания производительности акселератора за счет подключения дополнительных плат через порты ввода/вывода.
Большое внимание при проектировании семейства систем уделено вопросам диагностики неисправностей, автономной и комплексной настройке. С целью быстрой диагностики неисправностей в каждом функциональном блоке системы заложена возможность записи и считывания контрольной информации из основных операционных узлов через тестовую шину Т в управляющую ЭВМ. Это позволяет автономно контролировать состояние и устранять неисправности функциональных узлов, а также проводить комплексный контроль системы в целом.
Для этой цели создано тестовое программное обеспечение, состоящее из программной оболочки, подключаемых к ней тестов соответствующих устройств и библиотеки процедур, используемых при тестировании. Четкая и подробная диагностика позволяет быстро обнаружить и устранить неисправности. Указывается не только характер неисправности, но и ожидаемые сигналы и состояние аппаратуры в нескольких контрольных точках. Кроме того, существует пакет тестового обеспечения, позволяющий контролировать состояние любых функциональных узлов на всех стадиях обработки данных с использованием для этого реальных баз данных. Пользователю предоставляется возможность моделирования аналитически заданных траекторий подвижных объектов и редактирования их в процессе отладки динамики движения.
Функционирование семейства систем "Альбатрос" поддерживается программным комплексом трехмерного визуального моделирования, который включает следующие подсистемы: подготовку визуальных моделей; управление КСВ и отображение визуальных сцен.
Подсистема подготовки визуальных моделей [6] служит для автоматизации процесса создания трехмерных визуальных сцен и включает программу ввода трехмерной информации с плоских носителей, базовый язык описания визуальных моделей, интерактивный геометрический редактор для моделирования рельефа местности. Подсистема управления КСВ обеспечивает прием, интерпретацию и передачу параметров от тренажера, задает поведение объектов сцены, управляет имитацией различных эффектов природных феноменов, выполняет запись, хомпрессию и воспроизведение параметров поведения, обслуживает загрузку и выгрузку, активирование и дезактивирование моделей сцен, обеспечивает связь с оператором и полное управление параметрами сцены при отладке визуальных моделей, поддерживает синхронизацию каналов КСВ и их защиту от информационных перегрузок. Подсистема отображения обеспечивает процесс построения цветных тоновых изображений, являющихся видами сцен при соответствующих значениях анимационных переменных.
Разработанное семейство систем визуализации " Альбатрос " используется в авиационных и космических тренажерах. Принципы, заложенные в основу построения данного семейства, получили развитие в последующих работах, связанных с созданием систем визуализации нового поколения.
Рекламные анимационные ролики созданные студией Альбатрос
Также студия Альбатрос занималась производством компьютерных рекламных роликов на заказ. Давайте рассмотрим один из них который заказала Московская фирма по продаже компьютеров Kami а точнее её Новосибирский филиал - Kami-Nsk, директор Борис Брейтман. Вообще по заказу этой фирмы было создано два ролика мы рассмотрим второй.
Идея была попробовать объединить компьютерную графику, трёхмеренные фотографии и рисованную мультипликацию. Кроме того что все как бы ломятся за компьютерами Kami-Nsk, в рекламе показали реальный путь в офис. Для тех кто знает Новосибирск - от площади Ленина, мимо часовни, от ТЮЗа направо.
Чем занимается Лаборатория синтезирующих систем визуализации на базе которой была создана студия Альбатрос
Основные направления исследований:
• Исследование и разработка эффективных методов, алгоритмических решений для формирования и отображения высокореалистичной виртуальной среды в реальном масштабе времени.
• Применение методов виртуальной реальности для построения информационных, тренажёрных и обучающих систем.
• Исследование и разработка эффективных методов и технологий формирования, обработки и отображения распределённых мультимедийных данных в реальном масштабе времени.