Команда робототехников из Массачусетского технологического университета (MIT) и Университета Калифорнии в Сан-Диего создала новый тип дистанционного управления для роботов под названием Open-TeleVision, позволяющий использовать VR для контроля. Результаты их исследования опубликованы на сервере предварительных публикаций arXiv.
Хотя применение искусственного интеллекта (ИИ) в робототехнике приносит постепенные улучшения, автономные роботы до сих пор не могут работать так же плавно, как биологические существа, включая людей. Это привело часть сообщества к возвращению к идее о дистанционно управляемых роботах.
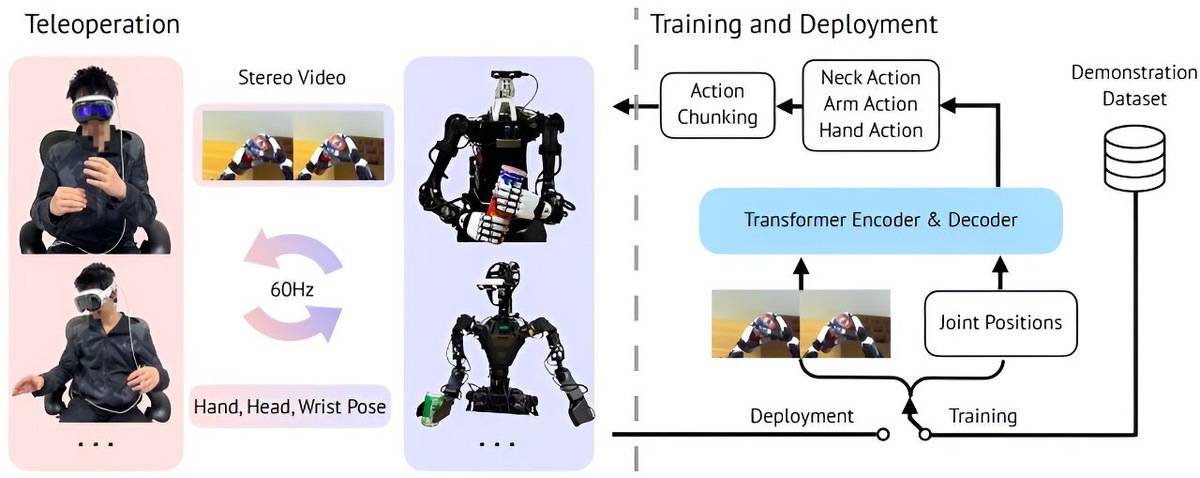
Новая система от MIT и UCSD значительно улучшила опыт управления роботом, предоставляя пилоту возможность иммерсивного контроля виртуальной реальности. Пилот, надевая VR-шлем, видит через глаза робота стереоскопически и может двигать головой, а также управлять руками и пальцами робота, двигая своими собственными.
Вместо использования сенсоров на руках и пальцах движения конечностей регистрируются с помощью удаленных сенсоров, аналогичных системе Kinect. Система позволяет пилоту чувствовать себя так, будто он находится в удаленном месте, выполняя действия, такие как поднятие и перемещение мячей в чашки, в то время как робот выполняет фактическую работу.