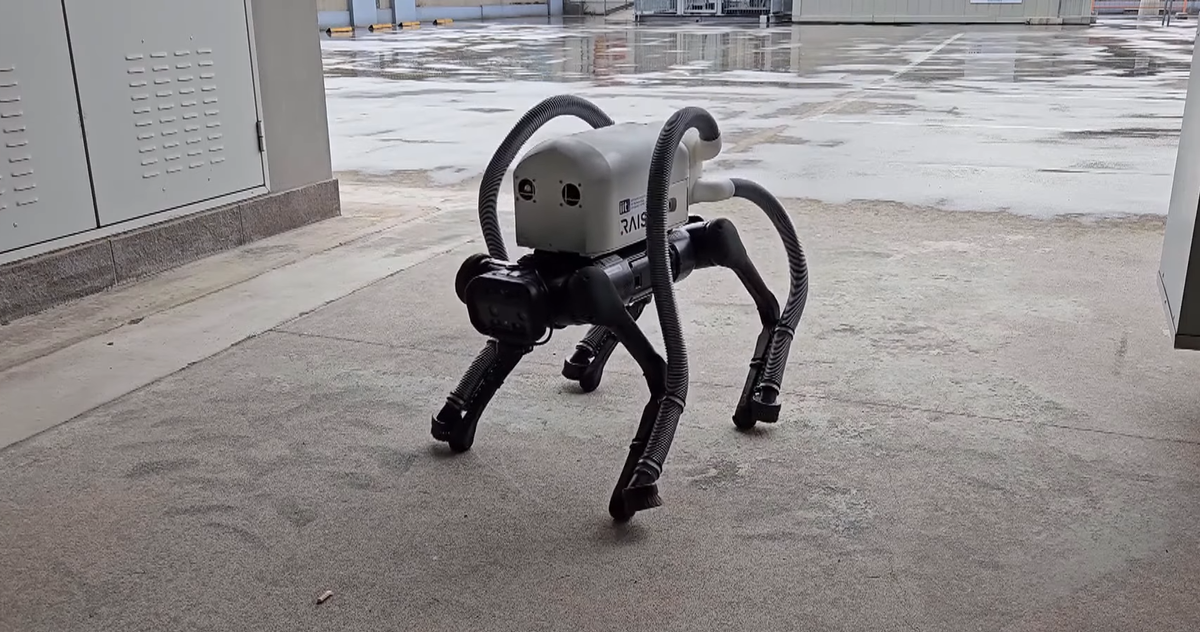
VERO оснащен вакуумным горбом и насадками для ног.
Из шести миллионов сигарет, ежегодно выкуриваемых во всем мире, люди выбрасывают примерно 4 триллиона окурков куда-нибудь, кроме пепельниц и мусорных баков. Учитывая как их размер, так и общую нечистоту, подавляющее большинство окурков остаются там, где они приземляются. Но даже несмотря на то, что большая часть табака давно исчезла, каждый остаток может загрязнить окружающее пространство более чем 700 токсичными химическими веществами.
Несмотря на то, что число курильщиков во всем мире продолжает снижаться, все эти окурки означают, что общество еще долго будет убирать остатки мусора. Мы будем очень признательны за любую помощь, которую имели в виду исследователи из Итальянского технологического института (IIT) в Генуе, когда разрабатывали своего нового героя, VERO.
Сокращение от «Робот, оснащенный пылесосом», VERO включает в себя то, что на сегодняшний день является повсеместно распространенным четырехногим ботом (в данном случае коммерчески доступное устройство AlienGo от Unitree), но с одним важным аксессуаром — пылесосом, который носят как рюкзак и используют в паре с насадкой для каждой ноги. Каждая вакуумная трубка на VERO, созданная робототехниками из подразделения Dynamic Legged Systems компании ITT, оснащена специальным соплом, напечатанным на 3D-принтере, чтобы гарантировать, что она может подойти как можно ближе к земле без ущерба для своей подвижности.
Обеспечить VERO апгрейдом пылесоса — это одно, а обучить робота эффективному использованию — совсем другая проблема. В статье, опубликованной в апреле в Journal of Field Robotics, исследователи описывают разработку нейронной сети, способной интерпретировать визуальные данные с бортовых камер VERO. Как объяснил IEEE Spectrum 18 июля, эта система должна быть достаточно чувствительной, чтобы точно определить мусор в захламленной среде, но также достаточно проницательной, чтобы игнорировать любые сканируемые дубликаты целей. После того, как он идентифицирует окурок, VERO должен рассчитать наилучшие маневры, чтобы разместить одну из своих ножек сопла на расстоянии всасывания, а себя уравновесить с помощью трех других конечностей. В отличие от многих колесных роботов, VERO предназначен для преодоления неровностей местности, лестниц и других подобных препятствий, поэтому он также должен взвешивать возможность опрокидывания и то, как правильно всасывать свои окурки.
По словам разработчиков, VERO в конечном итоге удалось достичь почти 90-процентной точности в различных сценариях окружающей среды. Несмотря на то, что это не самый быстрый четвероногий робот, его целеустремленная решимость и эффективность могут стать надежной машиной для сбора мусора, особенно если исследователи обучат его справляться с другим мусором. Они также считают, что VERO может оказаться полезным для других работ, включая опрыскивание сорняков на сельскохозяйственных полях, проверку целостности инфраструктуры и даже прикрепление заклепок или забивание гвоздей в строительных проектах.
Переведено Концентрированные новости