Программирование промышленных Роботов
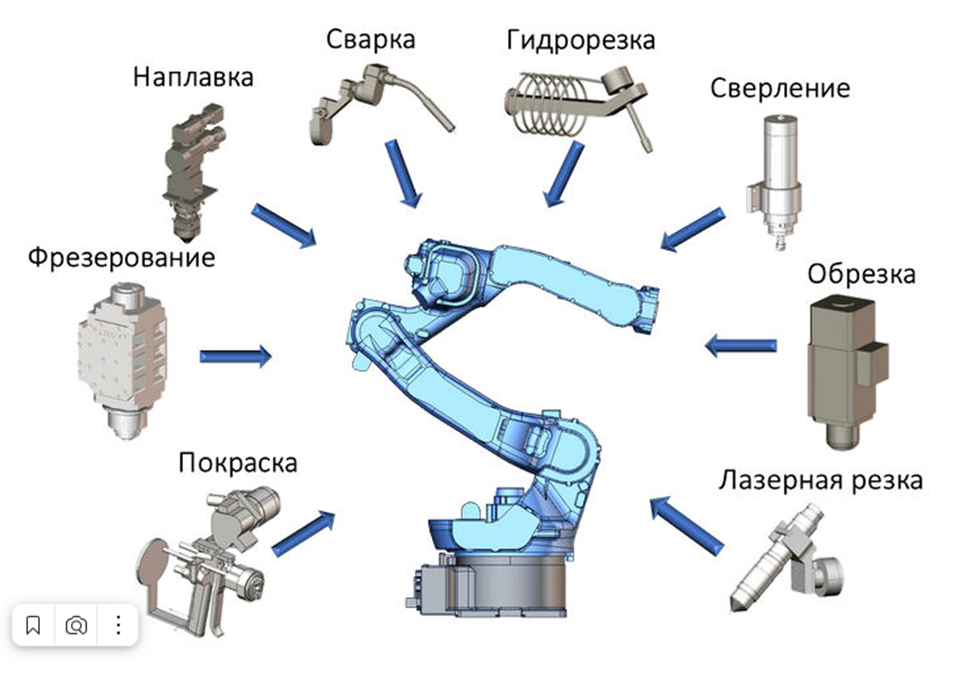
Промышленные роботы являются инструментом с высоким потенциалом применения. Они могут применяться для выполнения разных раздач, таких как сварка, обрезка, наплавка, фрезерная обработка и другие.
Система СПРУТКАМ - является полностью российским предложением в области разработки и моделирования управляющих программ для оборудования с ЧПУ.
Запись в Реестре российского ПО №1435 от 05.09.2016 г.
СПРУТКАМ — аналог и альтернатива иностранного программного обеспечения: Siemens NX CAM; Autodesk Fusion 360; Autodesk Delcam; Autodesk PowerMill; Autodesk FutureCAM; SolidCAM; Esprit; MasterCAM; PTC Creo и других.
Возможности программирования промышленных роботов
1. Основы и принципы для фрезерования с помощью робота
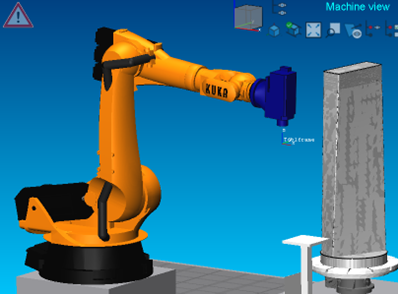
2. СПРУТКАМ - Моделирование и симуляция
3. Подготовка проекта в CAM для ячейки Робота
4. Кинематика роботов
5. Как получить путь к инструменту?
6. Какие данные и ограничения нужны Роботу?
7. Какие данные и возможности с СПРУТКАМ?
8. Какие данные для создания NC – кода, который управляется Роботом?
9. Путь инструмента – Его получение?
10. Обучение всех перемещений робота вручную
11. Обучение виртуальной траектории инструментов в программе моделирования робота
12. Генерирование и создание траекторий с помощью CAD/CAM Системы
13. Генерирование и создание траектории перемещений с помощью
Роботы – Что надо знать, прежде чем планировать Процесс
Именно кинематика Робота и его допуска в позиции зависят от его позиционирования
Данные для Робота?
- Робот должен быть откалиброван
- Для интеграции G кода Необходимы те же условия, что и для станка с ЧПУ: Нулевая точка позиции, Износ инструмента вспомогательные коды вкл./выкл.
- СПРУТКАМ – Создание траектории G-Кода в формате APT
- Программное обеспечение для моделирования робота стороннего производителя, проверка траектории инструмента и генерации кинематики робота, G коде в определенном формате контроллера робота
Ситуации и проблемы с Кинематикой Робота
- Как проверить столкновения осей робота и как их исправить
- Типичные проблемы сингулярности с Роботом
- Важно проверять первый подход к инструментальной траектории
- Легкость создания и готовый к использованию G-код для работы робота в среде СПРУТКАМ.
Преимущества использования СПРУТКАМ РОБОТ
Учет ограничений по вращению суставов робота
Минимальное и максимальное положение каждого сустава задается, исходя из особенностей каждого робота. При этом траектория учитывает эти ограничения и рассчитывается только в допустимых пределах перемещения осей.
Учет зон сингулярности
Траектория полностью исключает зоны сингулярности.
Карта осей робота позволяет автоматически настроить положение дополнительных программируемых приспособлений (линейных перемещателей, поворотных позиционеров).
Проверка на соударения
и моделирование
Проверка на соударения в роботизированной ячейке осуществляется еще на этапе расчета траектории. Можно посмотреть, как именно перемещается робот и другие подвижные элементы роботизированной ячейки.
Программирование роботизированной ячейки
Расчет управляющей программы с использованием внешних осей: линейных (рельсы, направляющие); поворотных (позиционеры).
Доступно программирование нескольких роботов одновременно. (Многоканальность)
Спасибо что дочитали до конца, надеемся, что данный материал вам поможет немного разобраться, для чего и зачем нужно программное обеспечение для роботизации! Будем рады если поставите лайк.
#Робот #СПРУТКАМ #Технологии #Sprutcam


















