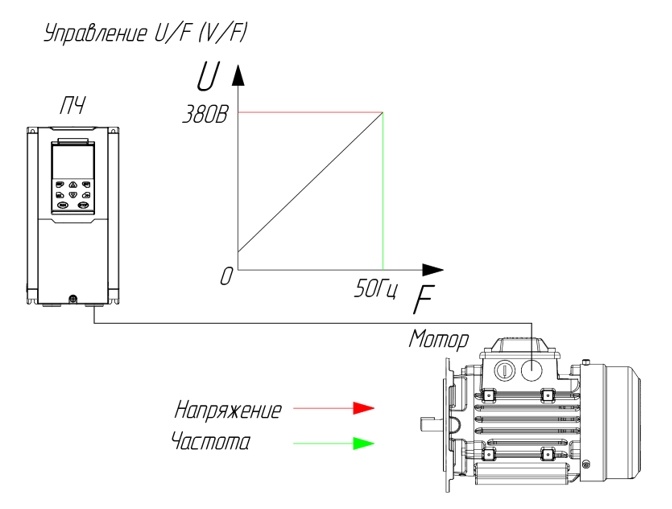
Скалярное управление (регулировка уровня напряжения и частоты). Самый распространенный способ управления скоростью электродвигателя. Обычно используется для управления насосами, вентиляторами, либо при подключении нескольких электродвигателей к одному преобразователя частоты. Преобразователь частоты отправляет на электродвигатель определенный уровень напряжения и частоты, при регулировке скорости электродвигателя изменяя подаваемую на него частоту, преобразователь частоты также изменяет и подаваемое на него напряжение. Стандартно это линейная зависимость (рисунок 1), то есть если электродвигатель имеет номинальные напряжение 380В и частоту 50Гц, то при задании 25Гц
При низком задании скорости (менее 5Гц) момент электродвигателя может сильно снижаться, что может вызвать рывки при вращении вала или полную его остановку. Во избежание этого есть функция повышения напряжения относительно частоты для повышения момента двигателя на низкой скорости, при этом растет потребляемый электродвигателем ток. При отсутствии независимого обдува возможен перегрев электродвигателя при продолжительной работе в таком режиме.
Еще одна особенность скалярного режима управления – это возможность экономить электроэнергию. Если преобразователь частоты управляет водяным насосом или вентилятором, то нет необходимости обеспечивать номинальный момент на всем диапазоне скоростей. Такая нагрузка имеет квадратичную зависимость когда при снижении скорости электродвигателя нагрузка на него уменьшается в квадрате. За счет этого при снижении скорости можно снижать напряжение нелинейно (см. рисунок 2) что позволит сократить энергопотребление в большей степени.
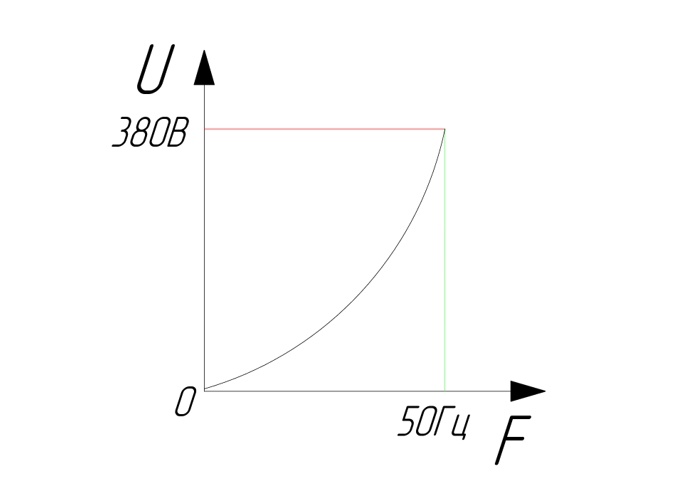
Как видно на графике, до определенного предела напряжение снижается квадратично относительно снижения частоты, со снижением напряжения снижается и потребляемый ток.
Скалярное управление используется, когда к преобразователю частоты одновременно подключены несколько электродвигателей, при управлении вентилятором, при управлении водяным насосом, когда нет возможности узнать параметры электродвигателя (отсутствует заводская табличка, электродвигатель после перемотки).
Плюсы использования скалярного управления:
- Работа с несколькими электродвигателями одновременно. К выходу преобразователя частоты можно одновременно подключить неограниченное количество электродвигателей. С соблюдением условий по номинальному току (сумма токов всех электродвигателей + запас 10%) и длине моторного кабеля (стандартно сумма длин кабелей после преобразователя частоты должна быть менее 50 метров).
- Возможность экономии электроэнергии. При работе с насосно-вентиляторной нагрузкой на скорости ниже номинальной и настроенной квадратичной кривой скалярного режима потребление электроэнергии снижается.
- Простота в настройке. При использовании стандартного электродвигателя 50Гц 380В достаточно только ввести его номинальный ток.
Минусы использования скалярного управления:
- Слабый пусковой момент. Даже используя функцию повышения крутящего момента максимальный выходной момент будет около 150% от номинального.
- Нет контроля вращения электродвигателя. Преобразователь частоты только отправляет напряжение и частоту на электродвигатель, не имея представления вращается ли электродвигатель. При заклинивании электродвигателя преобразователь частоты уйдет в аварию только при превышении заданного порога потребляемого тока.
- Нет контроля скольжения. Скольжение ротора асинхронного электродвигателя напрямую зависит от уровня нагрузки на вращаемый механизм и может колебаться в пределах от 1 до 10% от скорости изменения магнитного поля статора электродвигателя. Если нагрузка на механизм будет колебаться во время работы (например при прохождении сверла через слои материала различной плотности), то скольжение будет также постоянно изменяться и скорость вращения электродвигателя соответственно, в некоторых применениях это является очень критичным (например при движении крана по неровному полотну будут рывки при движении что ускорит износ механической части).