Инженеры из Северо-Восточного университета в Бостоне разработали алгоритм управления для ползающей робозмеи, с помощью которого робот может одновременно передвигаться и манипулировать предметами. Алгоритм позволяет роботу планировать траекторию движения с учетом сил реакции опоры и взаимодействия с предметом. Он был успешно протестирован сначала в симуляции, а затем на реальной робозмее COBRA, оснащенной 11 активными суставами и захватом для взаимодействия с объектами в головном сегменте. В ходе экспериментов COBRA успешно продемонстрировала различные сценарии локоманипуляций: поднятие ящика с пола, перемещение его по плоской поверхности и поднятие по наклонной плоскости. Препринт статьи опубликован на сайте arXiv.org.
Змееподобные ползающие роботы обладают рядом преимуществ перед колесными и шагающими роботами. Благодаря своей гибкости они способны проникать в узкие пространства, преодолевать сложные препятствия, например, взбираться по вертикальным лестницам, и адаптироваться к различным типам поверхностей. Однако большинство из созданных на сегодняшний день прототипов неспособны манипулировать предметами, что ограничивает их возможное практическое применение. Кроме того, недостаточно изучена сама тема использования свободно передвигающихся змееподобных роботов в роли манипуляторов.
Этот пробел решили восполнить инженеры под руководством Алирезы Рамезани (Alireza Ramezani) из Северо-Восточного университета в Бостоне. Они разработали алгоритм управления, который позволяет робозмее одновременно перемещаться и манипулировать предметами. Созданный разработчиками модульный робот-змея под названием COBRA состоит из 11 сегментов с активными суставами. В головной части располагаются бортовой компьютер, коммуникационный модуль, инерциальный измерительный модуль (IMU) для навигации, а также захват для взаимодействия с объектами. В заднем сегменте робозмеи находится сменный модуль полезной нагрузки, который можно адаптировать под конкретные задачи. Остальные сегменты идентичны друг другу. Каждый из них содержат актуатор, приводящий в движение сустав, соединяющий сегменты, и батарею.
Находящееся в переднем сегменте робозмеи устройство захвата представляет собой четыре выдвигающиеся по периметру боковой части лепестка. Чтобы взять предмет, робот вставляет передний модуль в закрепленный на объекте переходник с прорезями, после чего выдвигающиеся лепестки фиксируют сегмент внутри прорезей.
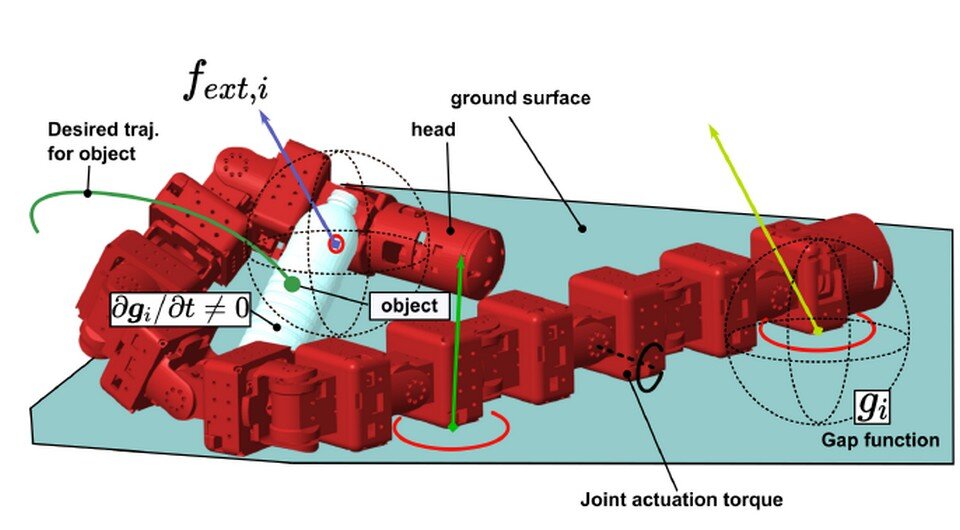
Для реализации локомоции с манипуляцией исследователи разработали алгоритм, основанный на неимпульсном контакт-имплицитном планировании пути. Он учитывает динамику движения робота, а также силы взаимодействия с поверхностью и перемещаемым предметом. В его основе лежит принцип наименьшего действия, согласно которому силы контакта определяются решением задачи оптимизации. Алгоритм находит оптимальные положения суставов для минимизации энергии, затрачиваемой на движение и манипуляцию. Для этого он учитывает ограничения на движение межсегментных суставов, управляющие моменты и кинематику робота, а также дополнительные условия, связывающие силы контакта и расстояние между роботом и поверхностью.
В результате COBRA оказалась способна планировать свою траекторию движения и одновременно манипулировать предметами, выполняя плавные и скоординированные действия. Разработчики сперва использовали алгоритм в симуляции для определения необходимых параметров, а после также провели эксперименты с реальным роботом. Робозмея продемонстрировала различные сценарии локомоции с манипуляцией.
Например, в одном эксперименте робозмея, опираясь на хвостовую часть тела, с помощью захвата в головной части поднимала небольшой ящик с пола и устанавливала его на платформу, расположенную на высоте 0,4 метра. В другом — наоборот, подняв и изогнув головную часть туловища, робот захватывал ящик, стоящий на платформе, и перемещал его на пол. Потом робот начинал двигать объект, толкая его сначала по ровной, а затем вверх по наклонной поверхности. При этом робозмея двигалась, используя тип движения, который можно охарактеризовать, как боковое качение с S-образным изгибом.
В будущем инженеры планируют усовершенствовать алгоритм, добавив возможность планирования траектории в режиме реального времени с учетом данных с тактильных датчиков, которые будут установлены на теле робота. Это позволит COBRA адаптироваться к изменениям в окружающей среде и выполнять более сложные манипуляции.
Японские инженеры разработали гибрид робозмеи и колесного робота, способный передвигаться по вертикальным металлическим поверхностям. Для этого на каждом сегменте робота установлена пара колес с магнитами.