Ключевые слова: 4D, BIM, строительство, хронографический, строительный проект, моделирование, оптимизация календарно-сетевого планирования, КСП, объемное, стратегическое планирование
Появление информационного моделирования зданий и четырехмерного (4D) моделирования вынуждает строительную отрасль адаптировать свои контрактные, эксплуатационные и технические режимы. В настоящее время имитационная 4D-модель представляет собой гистограмму или линейную диаграмму. Оба метода не подходят для моделирования строительных проектов, так как трудно отобразить последовательность работ, циркуляцию и поток поставок между площадками. Пространственно-временное планирование больше подходит в качестве модели планирования, так как оно учитывает деятельность, ресурсы и пространства одновременно. Тем не менее, большая часть процесса оптимизации, основанного на планировании пространства, использует методы детерминированной или стохастической оптимизации, и эти методы недостаточно жизнеспособны, чтобы их можно было применять к графикам строительства зданий. Количество параметров слишком важно, чтобы рассматривать его только с помощью алгоритмической оптимизации. Поэтому в данной работе предлагается гибридное решение, основанное на пространственно-временных методах, сочетающих графический, процедурный и алгоритмический аспекты. Интеграция пространств и операций обеспечивает непрерывность использования пространств и команд, а также линейного производства. Предложен подход, при котором приоритет отдается критическому пространству на критическом пути деятельности.
ПРЕДЫСТОРИЯ И ОБОСНОВАНИЕ
Четвертая промышленная революция с появлением технологий информационного моделирования зданий (BIM) и методов бережливого строительства, включая последний планировщик (Ballard, 2000), объемное планирование и время Takt (Frandson et al., 2013), вынуждают строительную отрасль адаптировать свои договорные, эксплуатационные и технические режимы.
На этапе реализации можно использовать методы 4D-моделирования для моделирования процесса строительства и, таким образом, для обнаружения ошибок последовательности операций и конфликтов использования пространства. В настоящее время в 4D-моделировании используется расписание, которое моделирует диаграмму Ганта/Очередности или линейную диаграмму.
Диаграмма Ганта/Приоритет — это метод планирования временной шкалы, который сочетает в себе графическое представление линейчатой диаграммы с логикой зависимостей очередности. На этой схеме основное внимание уделяется определению действий на временной шкале и ограничениях, а также распределению ресурсов. Поскольку она предлагает только внешние ограничения и моделирует производство работ с запаздыванием, логике приоритетов не хватает точности, что снижает надежность графика и ухудшает внутренний мониторинг взаимозависимостей деятельности (Francis, 2017). Кроме того, расчет критического пути основан только на времени, что ставит под угрозу его точность. Если пространство упущено из виду, планировщик может случайно запланировать несколько одновременных действий в одном и том же месте. Кроме того, помещения могут использоваться в недостаточной степени. Затем сайты могут стать перегруженными или расслабленными, что негативно скажется на продолжительности проекта. Для планирования деятельности в различных областях работы необходимо включить зоны в WBS, что значительно увеличит количество проектных мероприятий. Если добавить к этому то, что каждое действие отображается в одной строке, то рендеринг графики становится сложным. Фиск и Рейнольдс (2014) обсуждали визуальную сложность, связанную с этим методом. Они сообщили о трудностях при чтении линий зависимостей, которые часто расположены очень близко друг к другу и пересекаются с другими видами деятельности, что делает их запутанными без увеличительного стекла и цветного карандаша, чтобы обвести линии. Поэтому сложно проследить логику графически, представить пространственно-временные ограничения и оптимизировать график с помощью диаграммы Ганта/Очередности.
Ресурсы выделяются на деятельность; Чтобы оптимизировать процесс, большинство исследований сосредоточено на наилучшем способе выравнивания этих ресурсов, не беспокоясь о линейности использования одной и той же команды и между последовательными командами. Следует отметить, что обеспечить линейность, используя только этот процесс планирования, достаточно сложно, что требует планирования мероприятий и последующего распределения ресурсов. Противоположный случай справедлив при планировании работы для команд путем назначения им действий. Пространственно-временной метод, предложенный в данной работе, сочетает в себе три линейности: ресурсы, пространства и активности.
Моделирование пространств также упрощает планирование трафика и промежуточных запасов. Методы линейных диаграмм частично решают эти недостатки, обеспечивая линейность ресурсов для одной команды и между последовательными командами. Линейные диаграммы изначально предназначены для планирования линейных проектов. Хорошим примером являются инфраструктурные проекты; Оборудование выполняет работу линейно и непрерывно (например, грейдеры, бульдозеры, уплотнители, скреперы, а иногда экскаваторы и погрузчики). Как правило, для этого типа проектов общее количество линейных работ довольно мало, а количество выполняемых по видам деятельности довольно велико. Все эти факторы делают эту диаграмму хорошо подходящей для такого типа проектов.
Однако при планировании проектов строительства зданий линейные диаграммы менее пригодны. В этом типе проектов, как правило, важно количество активностей. Даже для одной и той же специальности различия между профессиями делают каждый вид деятельности уникальным. Мероприятия также должны быть спланированы в разных областях. Несмотря на то, что легко показать линейность действий в одной и той же области, умножение задач и зон затрудняет отображение последовательности работ, циркуляции и потоков поставок между различными зонами на строительном проекте (Francis and Morin-Pepin, 2017).
Повторяющиеся модели более приспособлены для планирования строительных проектов. Для этих проектов повторяющиеся задачи назначаются от подразделения к подразделению или от этажа к этажу. Это отличает их от линейных проектов, в которых оборудование работает непрерывно. Мы можем выделить два типа повторяющихся проектов: (а) вертикальные проекты, такие как многоэтажные здания, и (б) горизонтальные проекты, такие как строительство нескольких однотипных объектов. В повторяющихся вертикальных проектах некоторые виды деятельности, такие как фундамент и крыша, являются неповторяющимися, в то время как другие повторяются с одного этажа на другой, такие как структура, архитектурная отделка и услуги. В повторяющихся горизонтальных проектах большинство действий являются повторяющимися, и работа нескольких подразделений может быть спланирована одновременно, чтобы ускорить график проекта. Количество специализированных команд может быть рассчитано путем деления времени, необходимого для выполнения одного раздела, на общее время, доступное для выполнения работы по этой специальности для всех подразделений (Francis, 2015).
Поэтому более подходящим вариантом является сочетание повторяющегося моделирования с методами планирования пространства. Цель планирования пространства состоит в том, чтобы связать пространственные и временные аспекты, способствовать эффективному использованию объекта, определить оптимальную заполняемость площадки и обеспечить соответствующую ротацию рабочей силы в различных помещениях. Планировка пространства учитывает, помимо деятельности и ресурсов, площади участка, участвующие в планировании проекта. Действительно, важно учитывать пространства. В отличие от производственных работ, где работа поступает к рабочим, на строительной площадке рабочая сила перемещается к работе (Ballard and Howell, 1998). Рабочими местами часто пренебрегают в методах планирования строительной площадки, что приводит к перегруженности или конфликтам (Chua et al., 2010).
Оптимизация графиков строительства для строительных проектов, основанная на пространственном планировании, обычно использует методы детерминированной или стохастической оптимизации. Некоторые из них использовали статистические методы для управления занятостью участков (Rodriguez-Ramos, 1982; «Томмелейн», 1989; Yeh, 1995). Однако эти методы игнорируют возможное повторное использование пространства сайта. Другие используют методы динамической оптимизации сайта (Zouein and Tommelein, 1999; «Сюй и Ли», 2012; «Кумар и Ченг», 2015; Farmakis and Chassiakos, 2018) с помощью интерактивного отбора, компьютерного позиционирования ресурсов или динамического перемещения объекта от фазы к фазе. Эти чисто алгоритмические решения отлично подходят для продвижения научных исследований. С другой стороны, эти методы не слишком адаптированы для использования для оптимизации и контроля графиков на строительных площадках. Строительные площадки очень сложны, и при моделировании важно учитывать ряд параметров. Учет всех параметров делает модель очень сложной и трудоемкой. Затраты на моделирование также будут несоизмеримы с выгодами. Таким образом, каждая модель выбирает параметры, которые считаются важными, и пренебрегает всеми остальными, а пренебрежение параметрами отрицательно скажется на результатах. Кроме того, некоторые параметры зависят от обстоятельств на участке или управленческих решений; Например, задержки в согласовании или доставке материалов, отсутствие рабочей силы, модификации и погодные условия. В этих случаях этот документ подтверждает, что ничто не заменяет решений тех, кто участвует в выполнении работ на объекте.
Данная работа подтверждает идею о том, что графические решения, объединенные с последней системой планировщика, больше подходят для такого типа оптимизации и могут рассматриваться как системы поддержки принятия решений. Лоу (2015) ссылается на то, что оценка параметров моделирования является ключевой проблемой в моделировании строительства, особенно для прогнозирования графика на ближайшее будущее на этапе строительства. Поскольку моделирование является компьютерным статистическим выборочным экспериментом, базис выборки, т.е. плотность параметров моделирования, напрямую влияет на точность моделирования. Лишь немногие исследования были посвящены оптимизации графиков строительства зданий на основе графических подходов. Некоторые предлагают определять пространства в соответствии с их профессиональным статусом (свободные, занятые) (Winch and North, 2006), а другие — в соответствии с их типами использования (работа, хранение, обращение) (Riley, 1994; Riley and Sanvido, 1995) или в соответствии с потребностями заинтересованных сторон (Frandson and Tommelein, 2014).
Модели также описывают поведение пространств в соответствии с характером выполняемой в них работы (Riley and Sanvido, 1997) или в соответствии с их физической эволюцией в процессе реализации деятельности (Zouein and Tommelein, 2001).
Франдсон и Томмелейн (2014) разработали Takt time planning. Планирование Takt разбивает проект на зоны, которые обеспечивают линейное время Takt и непрерывность работы. Фрэнсис (Francis, 2004, 2013, 2016) разработал Хронографическую концепцию для моделирования проектной информации. Эта концепция позволяет чередовать один визуальный подход с другим путем манипулирования параметрами. Пространственно-временная модель (Francis and Morin-Pepin, 2017) демонстрирует строительные работы на переднем плане и пространства участка на заднем плане. Модель также учитывает различные ограничения выполнения, включая управление пространством и трафиком. Этот метод позволяет визуально контролировать ход выполнения проекта и пространственные конфликты.
ХРОНОГРАФИЧЕСКОЕ МОДЕЛИРОВАНИЕ
Хронографическое моделирование основано на визуальных графических подходах, в том числе пространственно-временных, что облегчает обмен информацией и графическую оптимизацию графиков. Хронографическое моделирование фокусируется на передаче информации с возможностью чередования одного визуального подхода к другому посредством манипулирования графическими параметрами. Это позволяет группировать, расставлять приоритеты и классифицировать информацию о проекте. Его преимущество перед существующими решениями для 4D-моделирования заключается в том, что он интегрирует планирование пространства в график. Концепция основана в первую очередь на критическом пространстве, а не на критическом пути деятельности.
КОНЦЕПТУАЛЬНАЯ ОСНОВА ПРОТОКОЛА ХРОНОГРАФИЧЕСКОГО СТАНДАРТА
Концептуальная основа протокола хронографического стандарта (Фрэнсис, 2016) определяет графический протокол для физических (производственных) объектов, их свойства и логические ограничения, которые определяют отношения между этими объектами и процессом выполнения. Физические объекты могут быть организованы графически с использованием различных организационных средств различения, ассоциации, масштабов и атрибутов. Мероприятия могут быть построены параллельно и последовательно. Деятельность может иметь одно или несколько внутренних подразделений. Эти деления могут быть связаны с внешними или внутренними масштабами. Внешние шкалы обычно представляют время, в то время как внутренние шкалы обычно представляют величины. Внутренние различия расширяют отношения между видами деятельности до отношений точка-точка, порождая реалистичные зависимости и новые типы поплавков (Francis and Miresco, 2006).
Концептуальная основа также определяет организационную модель и подходы к представлению этих образований. График проекта может быть смоделирован с помощью табличных и графических средств, а именно: (i) таблиц, показывающих подробную информацию об элементе (например, дату начала и продолжительность мероприятия); (ii) перекрестные таблицы, представляющие аналитические взаимосвязи между физическими объектами; (iii) чисто логические сети; (iv) диаграммы и сети с временным масштабированием; (v) хронографическое моделирование; (vi) 4D-модели; и (vii) диаграммы.
Результатом является представление одного и того же графика проекта с помощью различных совместимых подходов. Планировщик может переключаться от одного подхода к другому, манипулируя графическими параметрами. Визуальная коммуникация улучшается за счет наложения слоев, наложения листов, сопоставления, изменений и перестановок, что позволяет группировать, иерархизировать и классифицировать информацию о проекте. Таким образом, графическое представление становится живым, трансформируемым изображением. Исчерпывающие результаты можно найти в работе Francis (2013, 2016).
ОПРЕДЕЛЕНИЕ СЛОЕВ
Хронографический метод выделил пять (5) основных последовательных этапов реализации строительной фазы строительного проекта, а именно: создание пространств (например, надстройка новых этажей); системы (например, вентиляционные каналы); разделение пространств (например, перегородки); отделка (например, покраска); и закрытие помещений (например, укладка коврового покрытия). Хронографический метод графически моделирует эти этапы, создавая пять уровней графических слоев. Каждый из них подразделяется на зоны в соответствии со стадией строительства, создавая динамическую иерархию пространств. На рисунке 1А показаны пять слоев и их деление на зоны. Каждая зона идентифицируется по своему идентификатору (ID) и цвету (и/или текстуре). На каждом из этих пяти этапов планировка строительной площадки меняет свою конфигурацию. Будут добавлены новые пространства, создающие новые рабочие зоны. Другие помещения будут огорожены или закрыты, что ограничит передвижение людей, материалов и обратный цикл и в то же время усложнит управление объектами.
Каждая из операций сайта относится к одному из этих этапов. Таким образом, заливка бетона под новую плиту перекрытия позволит создать новые рабочие места. Системы будут устанавливаться по секторам или по системам. Перегородки будут разрезать пространства, чтобы создать меньшие площади для отделочных работ. Наконец, чтобы не повредить отделку пола, менеджер закрывает зоны, чтобы ограничить передвижение людей и материалов. Для этого легкость циркуляции и запас на полах будет зависеть от стадии строительства. Например, после установки подразделений, тираж и запасы будут более сложными и потребуют большей координации.
Нижняя часть (рис. 1Б) устанавливает иерархию слоев и зон и вес каждой зоны по отношению к своему слою. Иерархия создает сеть последовательности зон в соответствии с порядком выполнения на строительной площадке. Таким образом, каждая зона связана с другими зонами на предшествующем и последующем слоях. Эта сеть планирования без масштабирования по времени основана на рабочих местоположениях и структуре разбивки местоположений (LBS), а не на таких действиях, как традиционные сети метода критического пути (CPM). Если к зонам добавить длительности, то можно получить критический путь зон. На рисунке 5 показана последовательность этих пространств на заднем плане рисунка, а на рисунке 6 показана та же сеть пространств, но с использованием моделирования в масштабе времени.
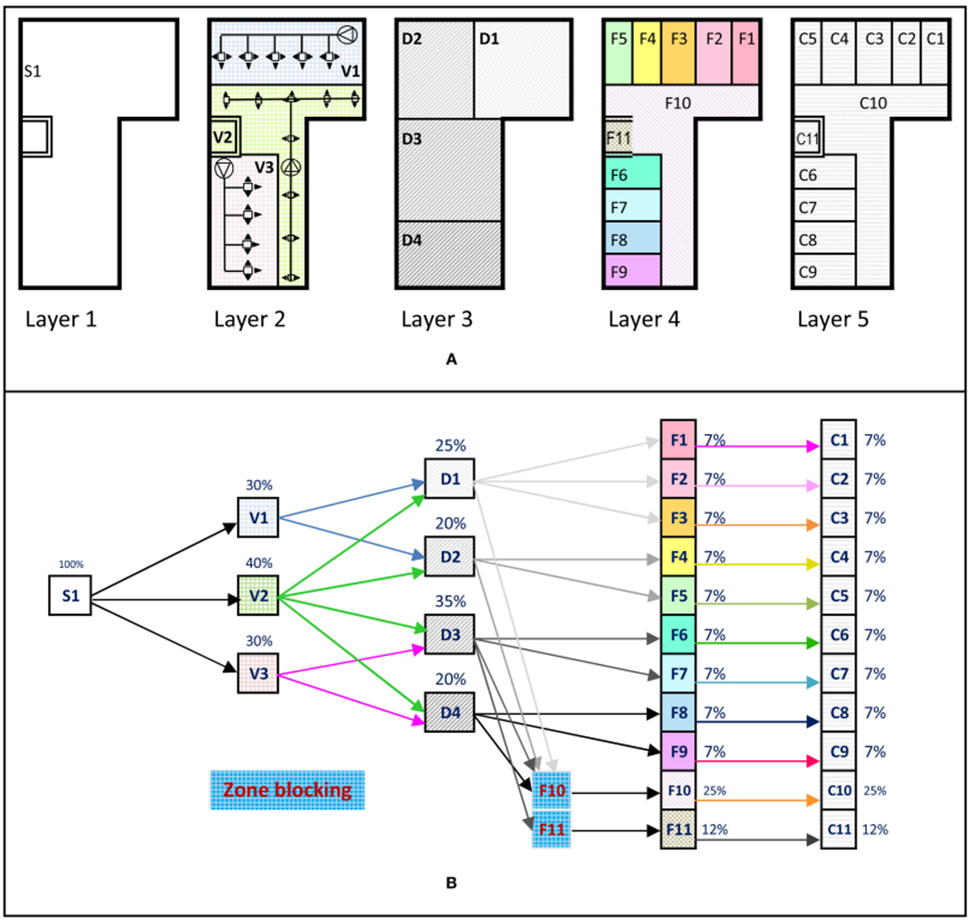
При такой системе операции над зоной определенного слоя могут начаться только тогда, когда будут освобождены все слои-предшественники, мешающие ей. Например, зона D2 третьего слоя (разделение пространства) освобождается только тогда, когда все операции над зонами V1 и V2 второго слоя (системы) завершены.
Кроме того, для обеспечения циркуляции на этажах некоторые участки должны быть заблокированы, что задерживает работу на определенный период. Эти заблокированные области добавляются в иерархию пространства. Например, шахта лифта (зона F11) перекрыта для вертикальной циркуляции между этажами здания. Эта блокировка задерживает установку лифта до тех пор, пока этот засор не будет снят. Другой пример касается коридора (зона F10), который был заблокирован на определенный период во время финишной фазы для облегчения горизонтальной циркуляции. Такая блокировка задерживает отделочные работы коридора.
ПРОСТРАНСТВЕННО-ВРЕМЕННОЕ ПЛАНИРОВАНИЕ ГРАФИЧЕСКАЯ ОПТИМИЗАЦИЯ
ЦЕЛЬ ИССЛЕДОВАНИЯ Основной целью данного исследования является моделирование и оптимизация работы и процесса выполнения строительных проектов зданий на основе хронографического моделирования. Цель состоит в том, чтобы связать пространственные и временные аспекты, способствовать эффективному использованию объекта, определить оптимальную заполняемость площадки и обеспечить соответствующую ротацию рабочей силы в различных помещениях.
Основным преимуществом предложенного метода является его относительная способность облегчать моделирование и оптимизацию работы сайта с использованием простых графических средств. Данная работа вносит свой вклад в существующий массив знаний, расширяя процесс оптимизации от чисто алгоритмических решений до гибридного процесса, основанного на графических, процедурных и алгоритмических методах.
ОСНОВНОЙ ЦЕЛЬЮ данного исследования является оптимизация графиков строительства зданий на основе графических, процедурных и алгоритмических методов. Этот гибридный пространственно-временной подход сочетает в себе оптимизацию использования пространства строительной площадки и исполнительных бригад. Это способствует непрерывному использованию пространств за счет максимизации заполняемости участка. Это также обеспечивает непрерывность работы за счет линейного производства для одной и той же команды и параллельной линейности между различными командами-преемниками.
ИССЛЕДОВАНИЯ ОГРАНИЧЕНИЙ
Это исследование ограничено строительными проектами. Предложенная система оптимизации даст лучшие результаты в случае многоэтажных зданий (например, башен), в случае нескольких однотипных зданий, в случае крупномасштабного здания, в котором работы повторяются между разными зонами, или для их комбинации. Для других типов зданий математическая оптимизация должна быть ограничена, а вклад менеджера должен быть увеличен. Следует отметить, что продолжительность проекта, основанного на таком подходе, зависит, прежде всего, от оптимального использования строительной площадки за счет обеспечения наилучшей заполняемости, а не только от критического пути деятельности. Поэтому мы отдаем приоритет критическому пространству на критическом пути. Причина этого в том, что расслабленный и недостаточно используемый сайт излишне задерживает график. И наоборот, перегруженность сайта увеличивает пространство и межличностные конфликты. Таким образом, метод предполагает создание графика проекта на основе последовательности критических пространств, занятых операциями, циркуляцией или промежуточными запасами.
Метод также учитывает непроизводственные виды деятельности, такие как промежуточные запасы, мусор, материалы для вторичной переработки, временные установки и движение на этажах. Эти непроизводственные действия занимают место и ограничивают или задерживают работу на месте. Если эти задержки увеличивают общую продолжительность проекта, они также увеличивают косвенные затраты и, следовательно, должны появиться на пути критического пространства. Таким образом, они считаются отходами и должны быть максимально сокращены. Поэтому при подходе к оптимизации необходимо учитывать всестороннее изучение трафика, временных установок, ежедневной уборки и стратегий вытягивания или своевременной подачи.
Совершенно очевидно, что необходимо учитывать множество ограничений моделирования. Во-первых, существуют ограничения, связанные с последовательностью действий. Во-вторых, мы должны учитывать ограниченность ресурсов, особенно при увеличении числа заинтересованных сторон и при условии, что большая часть работ выполняется субподрядчиками. В-третьих, на площадке есть ограничения по пространству со всеми конфликтами оккупации, которые она может породить. Наконец, вариативность условий исполнения, непредвиденные и неожиданные изменения. Таким образом, количество моделируемых параметров имеет большое значение. Любой неучтенный параметр негативно скажется на результате оптимизации. По этой причине приступить к чисто математической оптимизации практически невозможно. Графические или гибридные подходы к оптимизации с участием менеджера и других заинтересованных сторон более реалистичны.
Управление площадями и заполняемостью осуществляется по периодам и с привлечением реальных людей, участвующих в проекте. Основанная на последнем планировщике и методах планирования Takt, модель требует меньше усилий для построения и мониторинга, чем традиционные методы. Эти подходы обеспечивают реалистичные результаты с меньшим количеством ошибок. Таким образом, предлагаемая система благоприятствует принятию решений менеджером и рассматривается как система поддержки принятия решений.
Чтобы облегчить знакомство и понимание предлагаемого процесса оптимизации, в данной статье используются упражнения для демонстрации только ограничений преемственности. Оптимизация сроков, основанных на действиях, в том числе о методах компромисса между временными затратами и затратами, широко обсуждается в литературе.
ОПТИМИЗАЦИЯ ГРАФИКОВ И ЗАПОЛНЯЕМОСТИ Критическое пространство на критическом пути деятельности выравнивается путем расслабления или сжатия проекта в зависимости от загруженности участка. Этого можно было бы достичь, уменьшив или увеличив количество команд, что увеличило бы или уменьшило количество однотипных мероприятий, выполняемых в разных областях. Примером этого является использование двух бригад для установки гипсокартона Gyprock в двух зонах, чтобы занять больше места при одновременном сокращении времени в два раза, или, наоборот, уменьшение количества бригад для расслабления использования пространства. Эта логика кардинально отличается от методов оптимизации расписания, основанных на увеличении перекрытий между различными типами деятельности преемников. Примером этого является размещение электрических проводов в металлических шпильках до завершения установки шпилек в одном месте. Такое перекрытие не увеличивает количество ресурсов одного типа, но заставляет команды-преемники вмешиваться быстрее. Несмотря на то, что это сокращает продолжительность проекта, это увеличивает риск ошибок и, следовательно, переделок.
Расчет коэффициента заполняемости проектной площадки рассчитывается за период как сумма полученных коэффициентов заполняемости и относительного веса каждой зоны. Этот метод приписывает каждой зоне относительный вес, соответствующий ее влиянию на циркуляцию сайта. Например, коридор, используемый в качестве основного пути для циркуляции материалов, имеет гораздо больший вес, чем закрытое помещение. Графически уровень заполняемости демонстрируется диапазоном теплых и холодных цветов, где красный цвет является самым горячим, а фиолетовый - самым холодным.
Вопрос в том, как менеджеру определить правильную заполняемость сайта? В прошлом предлагалось два сценария. Первый, основываясь на опыте, менеджер определяет хороший уровень занятости, например, 70%. Эта система также определяет диапазоны занятий; Например, от 0 до 20% активность на сайте незначительна или отсутствует вовсе, а от 80 до 100% сайт перегружен. Во втором методе (Francis and MorinPepin, 2017) оптимальная заполняемость устанавливается равной 100%. Этот метод блокирует области, в которых задания не должны выполняться. Например, мы закрываем коридор на определенный срок для циркуляции. Другие зоны могут быть заблокированы для промежуточного хранения материалов или защиты рабочих мест. Эти заблокированные зоны учитываются как занятые при расчете заполняемости. Таким образом достигается оптимальный показатель 100% использования сайта.
Линейность процесса выполнения и планирование времени Takt Линейные методы предназначены для обеспечения непрерывности использования ресурсов и поддержки стабильного и оптимизированного производства. Линейные методы, как правило, удобны для линейных инфраструктурных проектов, например, с участием автомобильных и железных дорог, где оборудование и работает непрерывно. Это отличает их от повторяющихся проектов, где задачи обычно повторяются от подразделения к подразделению или от этажа к этажу. Можно выделить два типа повторяющихся проектов: вертикальные проекты, такие как многоэтажные здания, и горизонтальные проекты, такие как строительство нескольких однотипных зданий.
В строительных проектах не менее важна линейность повторяющихся действий. Эта линейность должна обеспечивать непрерывность использования ресурсов и пространств. Все ресурсы для повторяющихся действий планируются непрерывно. Линейность означает, что команда работает непрерывно и переходит из одной зоны в другую, не останавливаясь. Команды, которые сменяют друг друга, продвигаются по сайту в одинаковом темпе. Это означает, что как только команда освобождает зону, следующая команда занимает освобожденную зону. Это также означает, что существует непрерывность использования площадей и стабильная заполняемость участка.
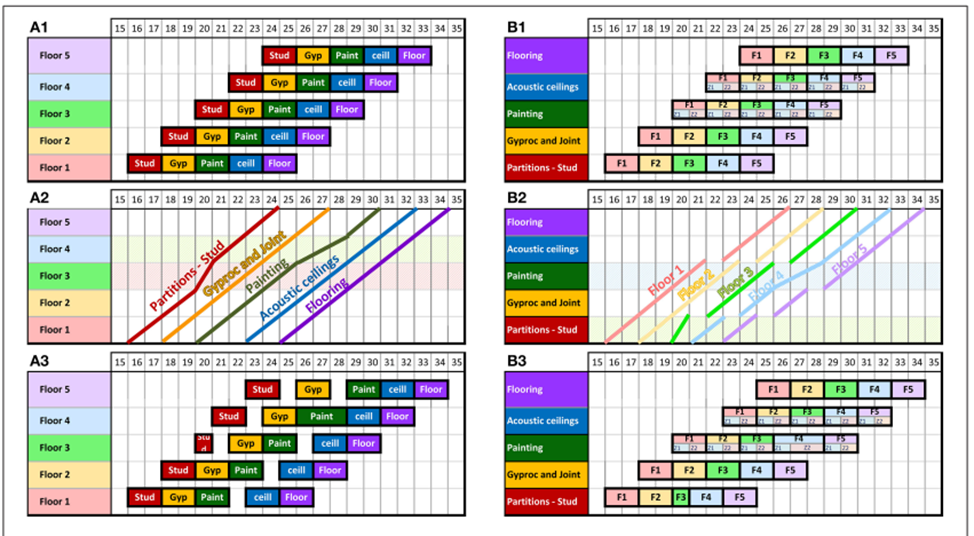
На рисунке 2 показана планировка пятиэтажного здания, в которой выполняется пять мероприятий: установка стоек, монтаж гипсокартона, покраска, монтаж подвесного потолка и напольное покрытие. Каждый этаж считается единой рабочей зоной, за исключением двух работ по покраске и натяжению потолков, для которых каждый этаж разделен на две зоны (Z1 и Z2). На этом рисунке моделируется проект с использованием различных подходов: линейного графика (рисунки 2A2, B2) и диаграммы Ганта (четыре других рисунка). Кроме того, на рисунках 2A1, A2, A3 виды деятельности сгруппированы по этажам, в то время как на рисунках 2B1, B2, B3 этажи (F1 - F5) и зоны (Z1 и Z2) сгруппированы по структуре декомпозиции работ WBS.
На рисунках 2A1, A2, B1, B2 выполнение линейное. Зоны разделены так, чтобы объем работ в каждой из них был практически равноценен. Количество команд (или людей) по каждой специальности настраивается таким образом, чтобы продолжительность на этаж или на зону была одинаковой. Мы варьируем производительность, чтобы зафиксировать продолжительность. Таким образом, все мероприятия имеют одинаковую продолжительность для каждой зоны (по 2 дня каждая). Таким образом, ротация команды на разных этажах или в разных зонах является линейной. Этот процесс выполнения называется планированием времени Takt. Такт-планирование времени определяет частоту ротации бригад между зонами для стабилизации работы на строительных площадках [23].
На рисунках 2A3,B3 идеальная линейность не может быть сохранена. Чтобы обеспечить планирование времени Takt, метод Chronographic устанавливает значение свободного числа в свободном обращении, равное нулю между действиями Takt. Это навязывание задерживает начало деятельности предшественников, чтобы связать их с их преемниками. Отложенный старт называется «стартом Takt». Упражнение «Шпилька» на 3-м этаже может быть выполнено за 1 день, а занятие «Покраска» на четвертом этаже должно быть более длительным и продолжительностью 3 дня. Задержка, вызванная действием «Краска» на 4-м этаже, задерживает занятие «Цейл», которое должно начаться рано утром 29-го дня. Чтобы обеспечить процесс Takt, начало действия "Ceill" на этажах с 1 по 3 также откладывается, когда их значение в свободном обращении установлено равным нулю. Таким образом, начало Takt этих действий происходит позже, чем их раннее начало, создавая стартовые свободные поплавки, которые рассчитываются по разнице между их началом Takt и их ранним началом. В этом случае руководителю приходится выбирать между непрерывностью использования бригад и непрерывностью использования рабочих зон. На рисунке 2B3 показано, что решение состоит в том, чтобы обеспечить оптимальное использование ресурсов с непрерывностью команды.
Процесс графической оптимизации, линейность и слои моделирования Целью графической оптимизации является обеспечение непрерывности использования ресурсов и пространств. Изучение линейности в эволюции деятельности позволяет оценить эту преемственность. Возникают четыре случая:
1) Линии расходятся; это означает, что расстояние между линиями (рис. 3А) и, следовательно, начальные свободные поплавки увеличиваются. В этом случае линейность может быть скорректирована за счет снижения производительности предшествующих видов деятельности (за счет уменьшения числа команд) или за счет ускорения темпов производства последующих видов деятельности (за счет увеличения числа команд). Решение может быть принято в зависимости от доступности команд;
2) Линии сходятся; это означает, что расстояние между линиями (рис. 3B) и, следовательно, начальные свободные числа с плавающей запятой уменьшаются (рис. 3B). В этом случае линейность регулируется за счет ускорения темпов производства предшествующих видов деятельности или за счет снижения производительности последующих видов деятельности;
3) Относительно параллельная линейность (рис. 3В) означает хорошую последовательность работы. Стартовые свободные поплавки также остаются постоянными. Это не значит, что занятость сайта оптимизирована. С целью оптимизации корректируется количество бригад для обеспечения оптимальной заполняемости пространств проектной площадки;
4) Наконец, две пересекающиеся линии обычно означают логическую ошибку, если только предшествующие и последующие действия не могут выполняться параллельно.
В соответствии с процессом графической оптимизации, предложенным хронографическим методом, оптимизация выполняется послойно. Для этого необходимо сначала определить начальную и конечную активность слоя. Деятельность, не имеющая технического предшественника в том же слое, считается начальной деятельностью слоя, а конец, не имеющий технического преемника в том же слое, считается конечной деятельностью слоя. Один и тот же слой может иметь несколько начальных и конечных действий.
На рисунке 3 показано, что если действия-предшественники, окрашенные в серый цвет, находятся на предыдущем уровне, то последующие действия становятся начальными действиями. Чтобы оптимизировать слой, сначала необходимо вычислить начальные свободные числа всех начальных активностей. Эти поплавки называются «свободными поплавками для первоначальной деятельности» (FSF-IA). Если кривая, нарисованная для этих полей, не является линейной, мы трассируем линейную линию тренда (синяя жирная линия на рисунке 3). Если линия тренда восходящая, что означает, что FSF-IA в целом увеличивается, оптимизация выполняется в том же слое. Если линия тренда является нисходящей, что означает, что FSF-IA в целом уменьшается, мы должны вернуться к оптимизации предыдущего слоя. Наконец, если линия тренда горизонтальная, что означает, что FSF-IA относительно эквивалентны, мы уменьшаем значение FSF-IA до максимума.
Таким образом, процесс оптимизации основан на линейности с параллельными темпами прогресса между командами-преемниками. Он также основан на максимизации заполняемости сайта. Оптимальные показатели заполняемости установлены на уровне 100%. Это возможно без загромождения участка, потому что метод блокирует области, где работы не должны выполняться, как для циркуляции, для хранения, так и для охраны работ.
ЭТАПЫ ПРОСТРАНСТВЕННО-ВРЕМЕННОГО ХРОНОГРАФИЧЕСКОГО ПЛАНИРОВАНИЯ И ОПТИМИЗАЦИИ
ПЛАНИРОВАНИЕ МОДЕЛИ
Роль менеджера заключается в том, чтобы координировать последовательность работ субподрядчиков между зонами и оптимально занимать площадку. В сотрудничестве с субподрядчиками он определит продолжительность каждого мероприятия по зонам и количество необходимых команд. Разделение зон осуществляется с целью обеспечения преемственности в операциях и оккупации объекта. Хорошее планирование обеспечивает линейность повторяющихся действий. Эта линейность обеспечивается добавлением ресурсных связей между повторяющимися действиями. Метод рекомендует не добавлять ссылки на ресурсы для неповторяющихся или разовых действий и использовать только технические ссылки.
Уровень детализации графика зависит от уровня контроля. Он ни в коем случае не должен превышать уровень полномочий руководителя. Например, руководителю генерального подрядчика бесполезно планировать поддеятельность и ресурсы субподрядчиков. Также желательно ограничить уровень детализации до максимума. График с высокой детализацией будет препятствовать хорошему планированию и оптимизации, так как менеджер потеряет общее представление о графике и сосредоточится на деталях. Эти сведения могут быть представлены в виде подзадач, шагов выполнения действий или списка задач, которые необходимо выполнить (не отображаются в представлении моделирования).
Для того, чтобы подготовить график проекта, менеджер приступает к пространственно-временному моделированию. На рисунке 4 показан процесс хронографического планирования.
Пример, показанный на рисунке 5, детализирует эти шаги путем моделирования графика этажа здания, показанного на рисунке 1. В этом моделировании планировщик определяет пять уровней слоев для управления пространством, а именно: (i) создание пространств для возведения конструкций (зона S1); (ii) системы (зоны V1–V2); (iii) разделение пространств для перегородок, электропроводки и водопроводных труб (зоны D1 - D4); (iv) финишная обработка (зоны от F1 до F11); и (v) закрытие пространств (зоны с С1 по С11). Зоны идентифицируются различными идентификаторами, цветами и/или текстурами.
В подходе используется графическое моделирование, показывающее строительные операции на переднем плане и пространства площадки на заднем плане (см. рис. 5). В нем используются цвета и атрибуты в соответствии с Хронографическим протоколом (Francis, 2016). После этой подготовительной работы менеджер приступает к пространственно-временному моделированию. Этапы моделирования подробно описаны ниже:
1. Первый слой: этот слой состоит из одной зоны (S1), демонстрируемой на заднем плане фигуры. Для упрощения модели возведение конструкции демонстрируется в одном действии без каких-либо подробностей. После завершения этого действия этот слой завершается и освобождает следующий слой;
2. Второй слой: три зоны этого слоя (от V1 до V3) освобождаются и моделируются на заднем плане. Мероприятия планируются на переднем плане. Этот слой имеет три начальных мероприятия (вентиляционная система). Субподрядчик принял решение направить одну бригаду для последовательного монтажа трех систем. Поэтому необходимы связи между ресурсами (красные линии) между видами деятельности;
3. Третий слой: после завершения работы каждой зоны второго слоя освобождаются мешающие им зоны на третьем слое. Четыре зоны (от D1 до D4) зависят от зоны V2. Кроме того, D1 и D2 зависят от V1 и D3, а D4 — от V3. Эти зоны моделируются в фоновом режиме, и можно приступать к начальным действиям («Wall Stud»). Так как существует только одна команда, между этими четырьмя действиями добавляются ссылки на ресурсы, показанные красными линиями. Также добавляются технические ограничения для их последующих видов деятельности («Трубы и проводка»);
4. Четвертый уровень: Менеджер должен действовать так же, как и с предыдущим уровнем. Основное отличие состоит в том, что связи между активностями одного и того же типа (например, от G1 до G9) являются связями Takt (красная двойная линия). Это означает, что между ними не должно быть свободных плавающих запятых. Потому что действие G8 задерживается по зонам D4 начало работ от G1 до G7 также откладывается. Отложенные старты называются «стартами Takt». Этот слой также содержит две зоны блокировки (F10 и F11). Эти области блокировки обычно зарезервированы для трафика или хранения. Зона блокировки может иметь гибкую продолжительность. Это означает, что его окончание зависит от даты начала деятельности-преемника. Чтобы сделать зону гибкой, ее конец контролируется сущностью «конец зоны в зависимости от начала последующей деятельности». Кроме того, если это последующее действие является исходным, его FSF-IA будет равен нулю (см. рис. 5);
5. Пятый слой: этот слой является слоем замыкания зоны. Это означает, что он не содержит никакой активности, а зоны просто заблокированы. Их графическое моделирование важно для расчета заполняемости сайта. На рисунке 6 показана масштабированная по времени сеть зон планирования в соответствии с процессом выполнения на строительной площадке. Каждая зона связана со своими предшествующими и последующими зонами. Эта сеть основана на рабочих местах, а не на видах деятельности, таких как традиционные сети CPM. Сложив длительности занятости зон, мы получим критический путь (S1, V3, D4, F9 и F10), обведенный красным цветом, как показано на рисунке.
Точно так же сеть зон, как и сеть активностей, дает лишь частичную информацию. Таким образом, оптимизация этих сетей является более сложной, а результат сомнительным из-за отсутствия информации о деятельности и ресурсах в случае сети зон и о площадях и ресурсах в случае сети видов деятельности. Пространственно-временное моделирование больше подходит для планирования, координации, мониторинга и оптимизации графиков строительства.
ПРОСТРАНСТВЕННО-ВРЕМЕННАЯ ОПТИМИЗАЦИЯ РАСПИСАНИЯ
Процесс пространственно-временной оптимизации оптимизирует использование как пространств, так и команд. Этот гибридный процесс основан на графических, процедурных и алгоритмических методах. Он интегрирует менеджера в принятие решений. На рисунке 7 показан процесс оптимизации. Детальный процесс выглядит следующим образом:
1. Оптимизация выполняется по слоям по порядку. Процесс оптимизирует первый слой, а затем переходит к следующему слою и так далее. Процесс начинается с оптимизации первого слоя создания пространств для монтажа стальных конструкций (рис. 8). В этом случае нет места для оптимизации. Затем планировщик должен перейти к оптимизации второго слоя и так далее.
2. Как только все заключительные действия на определенной зоне предыдущего слоя завершены, зоны последующего слоя, мешающие ей, освобождаются в соответствии с иерархией, показанной на рисунке 1. Начальная активность этих зон слоев может начаться.
3. В начале каждого слоя необходимо проверить кривую FSF-IA или ее линейную линию тренда, если она существует. Если кривая восходящая, что означает, что FSF-IA в целом увеличивается, оптимизация делается на том же слое (см. следующую точку, пункт 4). Если кривая направлена вниз, что означает, что FSF-IA в целом уменьшается, процесс должен заново оптимизировать предыдущий слой (см. пункт 5). Наконец, если кривая горизонтальная, что означает, что FSF-IA относительно эквивалентны, процесс устанавливает FSF-IA равным нулю (см. пункт 6).
4. Если кривая или линейная линия тренда в целом нисходящая, менеджер должен вернуться к предыдущему слою для его повторной оптимизации. Таким образом, в процессе оптимизации используется прямой/обратный процесс сжатия или расслабления в зависимости от загруженности. В предыдущем слое используется тот же процесс оптимизации, который был описан в предыдущем разделе.
5. Если кривая или линейная линия тренда в целом горизонтальная, FSF-IA уменьшаются до максимума. Затем мы проверяем заполняемость за период. Если этот показатель низкий, значит, сайт расслаблен. Процесс предлагает вернуться к предыдущего слоя, чтобы оптимизировать его. Менеджер должен работать с субподрядчиками, чтобы увеличить количество команд. Если это невозможно, он перейдет к следующему слою.
6. Если кривая или линейная линия тренда восходящая, оптимизация выполняется в том же слое. Возможны два случая:
а) Если кривая линейная: Для текущего слоя необходимо преобразовать все отношения ресурсов в отношения «начало-начало». Напомним, что ссылки на ресурсы используются только между повторяющимися действиями. После этого преобразования система параллельно проверяет количество действий для каждой группы повторяющихся действий. Например, на третьем уровне (рис. 8) для каждого из повторяющихся действий «Шпилька стены» и «Трубы и проводка» количество параллельных действий равно четырем. Можно запланировать максимум четыре команды каждого типа. Система должна показывать менеджеру количество требуемых команд, а также минимальное, оптимальное и максимальное количество команд для каждой повторяющейся группы. Система также должна демонстрировать количество доступных команд для каждой повторяющейся группы. Например, если для задания «Установка стен» состоит четыре команды, а для задания «Трубы и проводка» — две, менеджеру, как правило, приходится брать наименьшее количество доступных команд. Нет смысла брать четыре бригады «Шпильки стен», потому что в любом случае рабочие не могут закрыть стены раньше, зная, что доступны только две бригады «Трубы и проводка». Не стоит забывать, что в обратном случае невозможно иметь две команды для «Wall Stud» и четыре команды для «Pipes and Wiring». Менеджер может настроить систему таким образом, чтобы этот шаг выполнялся автоматически. Таким образом, будет принято решение о том, чтобы иметь наименьшее количество команд, доступных для всех повторяющихся действий-преемников. Наконец, если число выбранных команд меньше, чем количество последующих действий параллельно, будут добавлены отношения ресурсов.
б) Если кривая не линейная и нарисована линейная линия тренда, то необходимо действовать так же, как и с предыдущим пунктом (4а), за исключением того, что процесс оптимизации будет производиться поэтапно. Например, на рисунке 8 расчет FSF-IA (см. таблицу 1) показывает, что между активностями G4 и G5 не наблюдается увеличения. FSF-IA в обоих случаях равен 3 дням. Это также показывает, что два слоя F4 и F5 не начинаются одновременно. Во-первых, мы устраняем ресурсные связи между деятельностью G1 и G4. Затем изучаем смещение между началом слоев (в данном случае это F5 и F4). Если это смещение равно или превышает продолжительность повторяющихся действий, перекрытия не будет. Мы также можем удалить все ссылки на ресурсы этого второго шага, кроме первого (в нашем случае между G4 и G5), а затем перейти к следующему шагу.
Если повторяющиеся действия являются действиями Takt, обязательно должно быть наименьшее количество команд для всех групп. Поскольку свободная маржа равна нулю, начало действий-предшественников во всех случаях откладывается.
При таком процессе планирования и оптимизации заполняемость не может превышать 100%. Кроме того, не ожидается никаких конфликтов или беспорядка. Менеджер или система проверит заполняемость за период. Если этот показатель низкий, это означает, что сайт расслаблен. Поэтому он должен вместе с субподрядчиками решить, как увеличить количество бригад.
ТАБЛИЦА 1 | Расчет FSF-IA и количества команд.
Система также сможет рассчитать дополнительные затраты на добавление команд и выигрыш по косвенным затратам за сэкономленное время. Это позволит руководителю принять взвешенное решение. Менеджер также может принять решение о запуске моделирования процесса оптимизации, основанного на методах компромисса между временем и затратами, основанных на методах, уже известных и широко описанных в литературе.
ОБЪЯСНЕНИЕ ВАРИАНТОВ ОПТИМИЗАЦИИ НА РИСУНКАХ ПРИМЕРА
Два рисунка 6 и 7 демонстрируют влияние вариантов оптимизации на график и заполняемость. На рисунке 8 после освобождения второго слоя линейная линия тренда идет вверх (см. кривую на рисунке 5). Оптимизация выполняется в этом же слое. Ссылки на ресурсы удаляются, а расписание показывает, что мы работаем в одно и то же время (с V1 по V3) в одно и то же время. Менеджер смирился с этим выбором и запланировал три команды. Поскольку все области третьего слоя зависят от зоны V2, они завершаются, и третий слой освобождается. Можно приступать к начальным действиям Wall Stud. Линейная линия тренда восходящая; Оптимизация выполняется в том же слое. Ссылки на ресурсы удаляются, и временная шкала показывает, что мы все можем работать. Поскольку доступны четыре бригады по каждому виду деятельности, «Стойка стены» и «Трубы и проводка», менеджер может принять этот выбор и использовать четыре команды. Для четвертого слоя линейная линия тренда также восходящая. Кривая показывает, что процесс будет применяться поэтапно, так как между действиями G4 и G5 не происходит увеличения. FSF-IA в обоих случаях равны 3 дням. Это также показывает, что два слоя F4 и F5 не начинаются одновременно. Во-первых, мы устраняем ресурсные связи между деятельностью G1 и G4. Затем изучаем смещение между началом слоев (в данном случае это F5 и F4). Поскольку смещение равно длительности повторяющихся действий, перекрытия не будет; мы также удалим все ссылки на ресурсы этого второго шага, кроме первого (в нашем случае между G4 и G5). Максимальное количество команд — четыре для первого этапа и пять для второго. Менеджер решает, возможно, из-за наличия команд или на основе анализа компромисса между временем и затратами, задействовать только три команды для каждого из видов деятельности Takt (G, D, P, C и F).
Тот же процесс оптимизации, что и на рисунке 8, применяется на рисунке 9; Однако выбор разный. На втором и третьем уровнях менеджер всегда выбирает одну команду (рис. 9А). Таким образом, для четвертого слоя линейная линия тренда, как правило, является потомством. Если планировщик хочет сжать этот слой, он должен использовать обратный процесс и попытаться повторно оптимизировать предыдущий слой, задействуя, по крайней мере, две команды для выполнения работ «Стойки стен» и «Проводка и трубы» (рис. 9B). Таким образом, остальная часть процесса становится идентичной той, что показана на рисунке 8.
ЗАКЛЮЧЕНИЕ
В заключение, интеграция пространств, операций и временных аспектов способствует эффективному использованию строительных площадок и помогает менеджерам максимизировать заполняемость площадки, обеспечивать надлежащую ротацию рабочей силы между зонами и поддерживать линейное производство помещений и команд. Предложенная гибридная оптимизация (основанная на пространственно-временных методах) сочетает в себе графический, процедурный и алгоритмический аспекты и является лучшим решением для строительных площадок. При таком подходе приоритет отдается критическому пространству в критическом пути действий, определяя оптимальные показатели заполняемости сайта.
Предлагаемая система также способствует принятию управленческих решений; Поэтому она считается системой поддержки принятия решений. Чисто алгоритмические оптимизации сложно реализовать для создания сайтов из-за их сложности и количества параметров, которые необходимо учитывать в процессе оптимизации. В этом случае этот документ поддерживает концепцию о том, что ничто не заменяет решений тех, кто участвует в выполнении работ на объекте.
Эти исследования ограничиваются моделированием и оптимизацией проектов строительства зданий. Предложенная система оптимизации даст лучшие результаты в случае многоэтажных зданий, нескольких однотипных зданий, масштабных зданий, в которых работа повторяется между разными зонами или их комбинацией. Будущие работы позволят распространить этот процесс на другие типы проектов и автоматизировать связи между предложенными пространственно-временными графиками с 3D-моделями для создания 4D пространственно-временных симуляций.
ССЫЛКИ
Adel Francis, Quebec University
Ballard, G. (2000). The Last Planner System of Production Control. PhD. thesis, Department of Civil
Engineering, University of Birmingham, Birmingham.
Ballard, G., and Howell, G. (1998). Shielding production: essential step in production control. J. Constr.
Eng. Manag. ASCE 124, 11–17. doi: 10.1061/(ASCE)0733-9364(1998)124:1(11)
Chua, D. K. H., Yeoh, K. W., and Song, Y. (2010). Quantification of spatial temporal congestion in four-
dimensional computer-aided design. J. Constr. Eng. Manage. 136, 641–649. doi: 10.1061/(ASCE)CO.1943-7862.0000166
Farmakis, P. M., and Chassiakos, A. P. (2018). Genetic algorithm optimization for dynamic construction
site layout planning. Org. Technol. Manag. Constr. 10, 1655–1664. doi: 10.1515/otmcj-2016-0026
Fisk, R. E., and Reynolds, W. D. (2014). Construction Project Administration, 10th Edn. Franklin Lakes, NJ:
Pearson Education Inc.
Francis, A. (2004). La Méthode Chronographique Pour la Planification des Projets de Construction. Ph.D.
thesis, École de technologie supérieure, University of Quebec, Montreal. Avaliable online at: http://espace.etsmtl.ca/692/ (accessed May 19, 2004). (in French).
Francis, A. (2015). “Applying the Chronographical approach for modelling to different types of projects,”
Proceedings of the 5th International/11th Construction Specialty Conference (ICSC 15), (Vancouver, BC).
Francis, A. (2016). A chronographic protocol for modelling construction projects. Manag. Proc. Law 169,
168–177. doi: 10.1680/jmapl.15.00039
Francis, A. (2017). Simulating uncertainties in construction projects with chronographical scheduling
logic. J. Constr. Eng. Manage. 143, 1–14. doi: 10.1061/(ASCE)CO.1943-7862.0001212
Francis, A., and Miresco, E. T. (2006). A chronographic method for construction project planning. Can. J.
Civil Eng. 33, 1547–1557. doi: 10.1139/l06-148
Francis, A., and Morin-Pepin, S. (2017). “The concept of float calculation based on the site occupation
using the chronographical logic,” Procedia Eng. 196, 690–697. doi: 10.1016/j.proeng.2017.07.235
Frandson, A., Klas, B., and Tommelein, I. D. (2013). “Takt time planning for construction of exterior
cladding,” in 21st Annual Conference of the International Group for Lean Construction, (Fortaleza).
Frandson, A., and Tommelein, I. D. (2014). “Development of a takt-time plan: a case study. construction
research congress 2014: construction in a global network,”in Proceedings of the 2014 Construction Research Congress, May. (Reston, VA: American Society of Civil Engineers), 1646–1655. doi: 10.1061/9780784413517.168
Kumar, S. S., and Cheng, J. C. (2015). A BIM-based automated site layout[1]planning framework for
congested construction sites. Automat. Constr. 59, 24–37. doi: 10.1016/j.autcon.2015.07.008
Law, A. M. (2015). “Statistical analysis of simulation output data: the practical state of the art,” in
Proceedings of the 2015 Winter Simulation Conference, Huntington Beach. doi: 10.1109/WSC.2015.7408297
Riley, D., and Sanvido, V. E. (1995). Patterns of construction-space use in multistory buildings. J. Constr.
Eng. Manage. 121, 464–473. doi: 10.1061/(ASCE)0733-9364(1995)121:4(464)
Riley, D., and Sanvido, V. E. (1997). Space planning method for multistory building construction. J.
Constr. Eng. Manag. 123, 171–180. doi: 10.1061/(ASCE)0733-9364(1997) 123:2(171)
Riley, D. R. (1994). Modeling the space behavior of construction activities. Ph.D. dissertation,
Department of Architectural Engineering, Penn State University, University Park, TX.
Rodriguez-Ramos, W. E. (1982). Quantitative Techniques for Construction Site Layout Planning. Ph.D.
dissertation, University of Florida, Gainesville, FA.
Tommelein, I. D. (1989). SightPlan - An Expert System that Models and augments human decision-
making for designing construction site layouts. Ph.D. dissertation, Department of Civil Engineering, Stanford University, Stanford, California.
Winch, G. M., and North, S. (2006). Critical space analysis. J. Constr. Eng. Manag. 132, 473–481. doi:
10.1061/(ASCE)0733-9364(2006)132: 5(473)
Xu, J., and Li, Z. (2012). Multi-objective dynamic construction site layout planning in fuzzy random
environment. Automat. Constr. 27, 155–169. doi: 10.1016/j.autcon.2012.05.017
Yeh, I. C. (1995). Construction-site layout using annealed neural network. J. Comp. Civ. Engrg. ASCE 9,
201–208.
Zouein, P. P., and Tommelein, I. D. (1999). Dynamic layout planning using a hybrid incremental solution
method. J. Constr. Eng. Manag. 125:6 doi: 10.1061/(ASCE)0733-9364(1999)125:6(400)
Zouein, P. P., and Tommelein, I. D. (2001). Improvement algorithm for limited space scheduling. J.
Constr. Eng. Manag. 127, 116–124. doi: 10.1061/(ASCE)0733-9364(2001)127:2(116)