Подписчик Эдуард Л., с которым ведется активная переписка, очень хороший экспериментатор. Он провел ряд интересных экспериментов по оптике, в частности получил несколько интерференционных картин от обычной швейной иглы. В настоящее время Эдуард Л. проводит эксперименты по изучению свойств массы, сил притяжения и сил инерции. Чтобы помочь Эдуарду в теоретической части был подготовлен файл Excel, в котором путем численного интегрирования смоделирован следующий процесс:
Тележка соединена с подвижной частью динамометра нитью. Корпус динамометра укреплен неподвижно. На тележке установлен груз, и общая масса тележки с грузом составляет 1 кг. Отодвинем тележку так, чтобы динамометр показал 0.1 Н, после чего отпустим тележку. Пружина динамометра будет сокращаться и разгонять тележку до тех пор, пока не сожмется до своего нормального значения. Тележка, разогнавшись проедет еще некоторое расстояние, пока сила трения в осях колес не остановит тележку полностью.
Можно растянуть пружину динамометра до показания 0.2 Н, тогда тележка проедет большее расстояние. Можно установить массу тележки в 0.5 кг, и опять будет другой пробег. Давайте разберем теорию на основе законов Ньютона и других. Но вначале о допущениях. Сила трения – капризная штука и зависит от многих факторов. Поэтому в формулах она будет представлена как произведение веса тележки на заданный нами коэффициент, который можно подобрать, наблюдая опыты. Введем следующие обозначения:
M – масса тележки с грузом = 1 кг
G – ускорение свободного падения = 9.81 м/сек^2
Kтр – коэффициент трения, принят = 0.001
Fнач – начальное усилие динамометра = 0.1 Н
Для выполнения расчетов нам понадобятся еще сведения о динамометре:
Lшк – Длина шкалы динамометра, принята = 0.15 м
Fшк – максимум шкалы динамометра, принят = 1.0 Н.
Из этого можно определить, что начальное отклонение стрелки динамометра от нуля
Xдин0 = Fнач*Lшк/Fшк
В расчете понадобятся текущие параметры, для каждого расчетного момента времени:
Xдин – отклонение указателя динамометра от отметки 0.
Fдин – усилие, создаваемое динамометром.
Xтлж – расстояние от начального до текущего положения тележки.
Vтлж – Текущая скорость тележки. В начале равна 0.
Wтлж – Текущее ускорение тележки.
Fтр – сила трения колес тележки.
Числовое интегрирование ведется с определенным шагом времени dt, который мы примем 0.05 сек. Будем считать, что на протяжении шага интегрирования силы и ускорения не меняются.
Как только тележка пройдет путь равный Xдин0, эта сила станет равной нулю, нить провиснет, и тележка покатится по инерции. Поэтому сила, с которой динамометр натягивает нить:
Если Xтлж<Xдин0
Fдин = Xдин * Fшк / Lшк = (Xдин0 – Xтлж) * Fшк / Lшк
Иначе Fдин = 0.
Сила трения действует, пока скорость тележки больше 0
Fтр = M * G * Kтр
Ускорение тележки создается тянущей силой Fдин и уменьшается тормозящей силой Fтр. Оно составит
Wтлж = (Fдин - Fтр) / M
Скорость в начале следующего шага интегрирования будет
Vтлж = Vтлж + Wтлж * dt
Hасстояние от начального положения тележки в начале следующего шага интегрирования будет
Xтлж = Xтлж + Vтлж * dt + Wтлж * dt * dt / 2
Повторяя шаги интегрирования необходимое количество раз, получим полную картину движения тележки от действия однократно растянутого динамометра.
Вот что примерно должно получиться при различных сочетаниях массы тележки и предварительно растянутого динамометра.
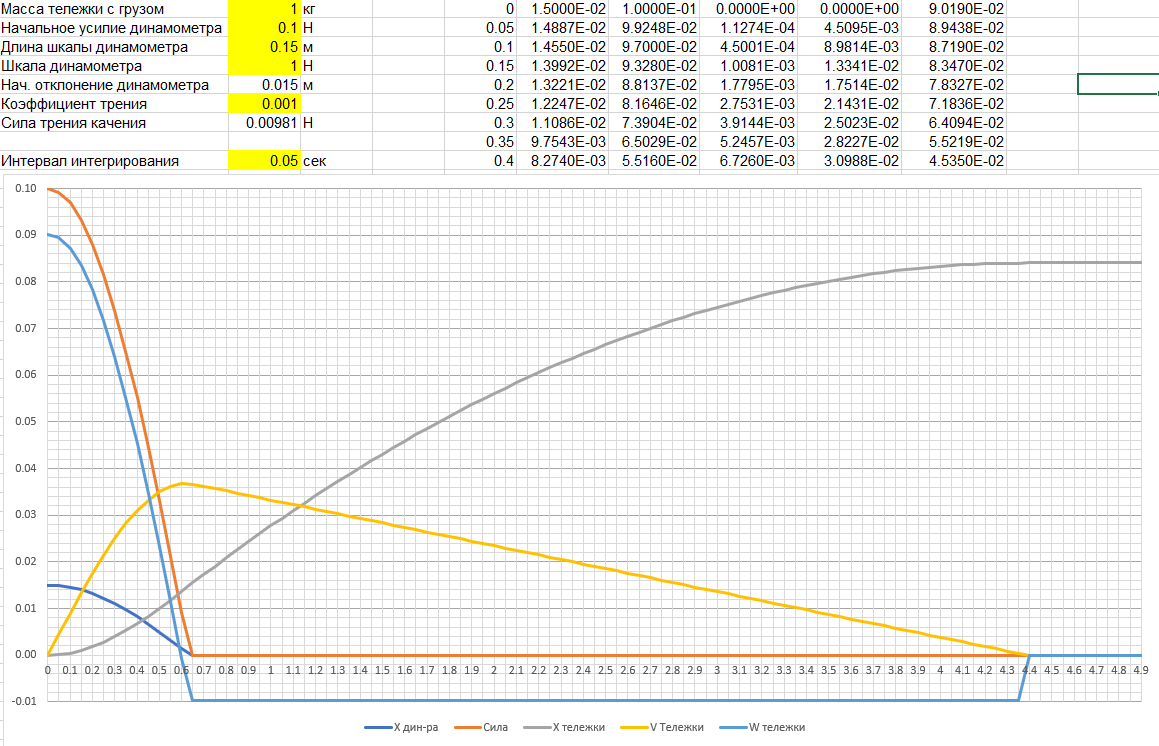
Приведенные графики получены с помощью Excel в этом файле https://disk.yandex.ru/i/nNo5ZKBp4puJ9w. Все, кто готов повторить эксперимент «в натуре», могут скачать его. Для правильного прогнозирования полного пути тележки, Вам придется сначала настроить параметры динамометра (длину шкалы в метрах и максимальную силу в Ньютонах), а также подобрать коэффициент трения, соответствующий Вашей тележке и поверхности, по которой она катится. Возможно, придется выровнять пол по уровню, чтобы не вмешивалась скатывающая сила.
Удачи в экспериментах и спасибо за чтение.
PS. Подписчик Уолли Тонт обнаружил ошибки. Они устранены и файл на ссылке обновлен.