Лазерные системы быстрого сканирования все чаще используются в полупроводниковых технологиях, аэрокосмической промышленности, биомедицине, нанонаучных исследованиях и других областях, а также предъявляют все более высокие требования к их производительности. Под влиянием многих факторов, таких как его объем, частота сканирования, точность сканирования и разрешение сканирования, появилось больше миниатюрных, высокоскоростных и точных сценариев сканирования. Благодаря своим преимуществам небольшого размера, высокой точности и высокой резонансной частоты пьезоэлектрическая облачная станция стала основным компонентом лазерной системы быстрого сканирования.

Лазерное сканирование - это использование зеркал или линз для точного позиционирования и управления световым маршрутом через энергию лазерного луча для обеспечения стабильности лазерного луча, цель которого можно разделить на лазерное изображение и лазерную обработку.
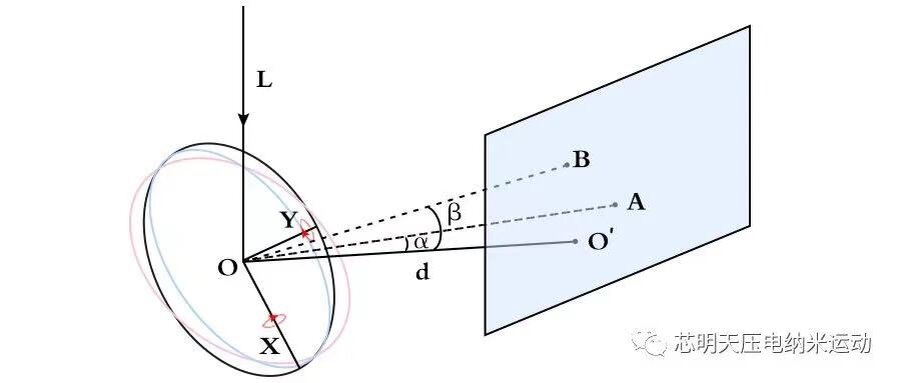
Например, лазерное изображение, когда лазерный луч облучает поверхность сканируемого объекта, отражается или рассеивается поверхностью объекта, отражающий свет фокусируется через линзу или зеркало, а затем отражается обратно в приемник сканирующего устройства, собирает световые сигналы, отраженные или рассеянные поверхностью объекта, а затем обнаруживает и обрабатывает полученные световые сигналы. Получите некоторые физические свойства объекта, такие как размер, форма, пространственное положение, пространственное направление, цвет, изменение цвета, текстура поверхности, химический состав и так далее.
Лазерная обработка относится к обработке лазерного луча, через одну или несколько линз, зеркал, в конечном итоге падает на поверхность обрабатываемого объекта, регулируя угол зеркала, чтобы обработать различные положения.
Платформа с пьезоэлектрическим наконечником / наклоном может быть установлена в сканирующем устройстве для точного позиционирования и управления световым маршрутом. пьезоэлектрическая облачная станция имеет более высокую частоту, точность и скорость отклика, ее замкнутая система управления имеет более высокую точность позиционирования, может значительно повысить эффективность и точность сканирования.
Платформа CoreMorrow
На пьезоэлектрической оконечной / наклонной платформе CoreMorrow в качестве приводного элемента используется пьезоэлектрическая керамика. Его внутренняя конструкция использует одностороннюю ошибку гибкой шарнирной параллельной направляющей структуры, внешняя механическая структура через расширение внутренней многокристальной пьезоэлектрической керамики для достижения одноосного или многоосного углового отклонения. Небольшая компенсация обеспечивает высокую точность и стабильность облачной платформы с помощью управления замкнутым контуром встроенного высокоточного датчика и обеспечивает субмикродуговое разрешение и точность позиционирования микродуги. Широко используется в таких областях, как регулировка оптического пути, спутниковая лазерная связь, лазерная стабилизация, деформационные зеркала, обработка и стабилизация изображений, лазерное сканирование, отклонение луча.
пьезоэлектрическая платформа CoreMorrow для управления лазерной системой быстрого сканирования
Рекомендуемый контроллер
Высокопроизводительные пьезоэлектрические концевые / наклонные платформы должны соответствовать высокопроизводительным пьезоэлектрическим контроллерам. В зависимости от различных сценариев использования, мы можем предоставить клиентам различные структурные формы, различные способы управления и несколько моделей пьезоэлектрических контроллеров для решения проблем точного управления позиционированием в различных сценариях применения.
Е70 пьезоэлектрический контроллер
E70 - это трехканальный пьезоэлектрический керамический контроллер небольшого размера, высокой мощности, низкой мощности, высокой пропускной способности и низкого шума текстур, который обеспечивает цифровую связь через последовательные, USB или сетевые порты.
E80.D3 - O пьезоэлектрический контроллер
E80.D3 - O в основном используется для привода пьезоэлектрических облачных платформ с тремя выходами, а третий канал является выходом постоянного давления и подходит для дифференциального привода. Он имеет две формы: тип коробки и лист на выбор.
E80.B3K - I пьезоэлектрический контроллер
пьезоэлектрический контроллер E80.B3K - I предназначен для привода пьезоэлектрического рулевого зеркала с выходом 3 канала, который содержит выход постоянного напряжения и идеально подходит для дифференциального привода. пьезоэлектрический контроллер E80.B3K - I1 имеет функцию датчика монитора, который может выводить сигналы напряжения датчика с обратной связью с маршрутом PZT и подходит для управления внешним замкнутым контуром.
E80.B3K - J пьезоэлектрический контроллер
Пластинный пьезоэлектрический контроллер E80.B3K - J представляет собой трехканальный выход, содержащий пьезоэлектрический контроллер с постоянным напряжением, управляемый аналоговым сигналом. Оснащен модулем мониторинга датчиков.
E80.B5S Пластинный пьезоэлектрический контроллер
E80.B5S предназначен для одновременного привода двух наклонных / наклонных платформ. Используя источник питания DC28V, выходное напряжение составляет - 20V ~ 120V (необязательно - 20V ~ 100V / 150V). Небольшие размеры (всего 222×180×40mm ^ 3) позволяют решать проблемы ограниченного пространства. Кроме того, специальные компоненты, используемые в E80.B5S, делают его пригодным для использования в аэрокосмических классах.
Для получения дополнительной информации свяжитесь с нами по телефону 0451 - 86268790, 17051647888 (WeChat ID)!