Ученые из Университета Мичигана недавно разработали робота SKOOTR, который может эффективно перемещаться вокруг себя без переворачивания. Этот робот, представленный в статье на препринт-сервере arXiv, оказался более устойчивым, чем другие трехногие роботы, которые часто страдают от плохой устойчивости из-за отсутствия четвертой ноги для лучшего балансирования своего тела.
"Одной из основных задач моей лаборатории является разработка открытых робототехнических платформ, которые часто вдохновляются биологией", - сказала Талия Й. Мур, соавтор статьи. "Мне пришла в голову эта идея, когда я каталась на офисном стуле между группами студентов. Я поняла, что пассивно катящийся офисный стул легко может вращаться в любом направлении, и я могу использовать свои ноги для выполнения различных маневров, оставаясь удивительно стабильной. Я поняла, что этот возможный маневренный потенциал похож на то, как морские звезды меняют направление при плавании".
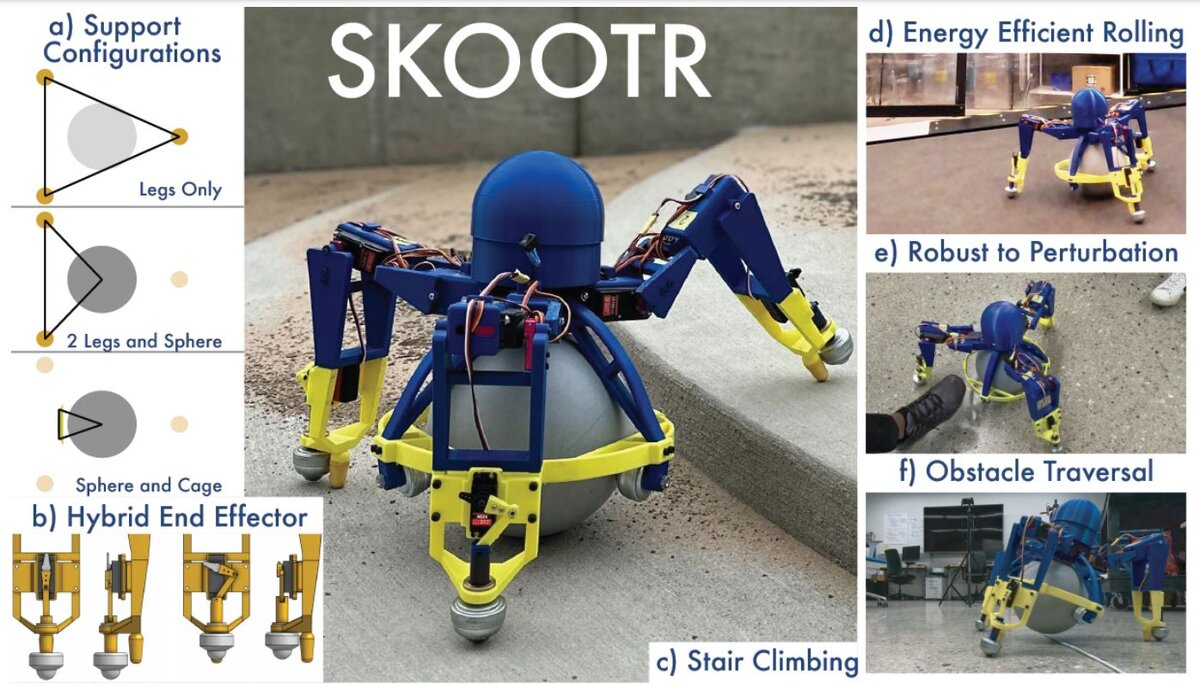
Основной идеей, которая лежит в основе этого последнего исследования, было сочетание маневренности шарового робота с устойчивостью и многофункциональностью робота с ногами. Использование радиально-симметричной конфигурации, подобной морской звезде или паутине паука, позволило бы роботу легко менять направление, но требовало бы открытия новых форм передвижения, возникающих при одновременном толчке и катании. Мур предложила эту идею своим студентам-бакалаврам, и один из них, Адам Ханг, решил дальше исследовать ее.
"Адам Ханг уехал на лето и построил робота, используя свой 3D-принтер дома", - сказала Мур. "Один из моих аспирантов, Чаллен Эннинфул Аду, также помогал с динамикой и управлением. Мы встречались каждую неделю по Zoom весь тот летний период и к началу осеннего семестра у нас был полностью функциональный робот". SKOOTR, робот, разработанный Мур и ее коллегами, состоит из большой сферы, расположенной посередине трех роботизированных ног. На вершине пассивно вращающейся сферы находится центральный узел, в котором находятся все электронные компоненты, поддерживающие работу робота.
Источник:
Адам Джошуа Хунг и др., SKOOTR: катающийся на коньках всеориентированный трехногий робот (Adam Joshua Hung et al, SKOOTR: A SKating, Omni-Oriented, Tripedal Robot), arXiv (2024). DOI: 10.48550/arxiv.2402.04374
-------------------------------------
Вы можете поддержать проект подпиской на канал, реакциями и комментариями, а также подписавшись на наши страницы на других площадках и на сервисе поддержки авторов Бусти. Ссылки найдёте в описании канала. Заранее спасибо!