Сотни роботов снуют взад-вперед по полу колоссального роботизированного склада, хватая товары и доставляя их работникам-людям для упаковки и отправки. Такие склады все чаще становятся частью цепочки поставок во многих отраслях, от электронной коммерции до автомобилестроения.
Однако эффективно доставить 800 роботов к месту назначения и обратно, не допуская их столкновения друг с другом, - непростая задача. Это настолько сложная проблема, что даже лучшим алгоритмам поиска путей трудно угнаться за головокружительными темпами электронной коммерции или производства.
В некотором смысле эти роботы подобны машинам, пытающимся ориентироваться в переполненном центре города. Итак, группа исследователей Массачусетского технологического института, которые используют искусственный интеллект для уменьшения заторов на дорогах, применила идеи из этой области для решения этой проблемы.
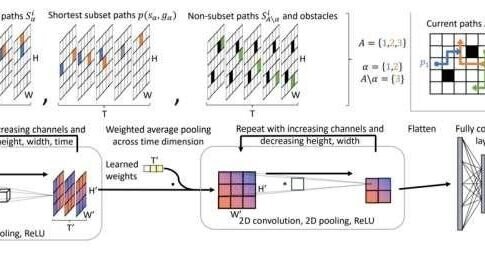
Они создали модель глубокого обучения, которая кодирует важную информацию о складе, включая роботов, планируемые маршруты, задачи и препятствия, и использует ее для прогнозирования наилучших участков склада, которые следует очистить для повышения общей эффективности.
Их технология делит складских роботов на группы, поэтому эти меньшие группы роботов можно быстрее обезвредить с помощью традиционных алгоритмов, используемых для координации роботов. В конце концов, их метод избавляет роботов от лишней нагрузки почти в четыре раза быстрее, чем надежный метод случайного поиска.
Помимо оптимизации складских операций, этот подход к глубокому обучению может быть использован в других сложных задачах планирования, таких как проектирование компьютерных чипов или прокладка труб в больших зданиях.
"Мы разработали новую архитектуру нейронной сети, которая действительно подходит для операций в режиме реального времени при масштабах и сложности этих складов".
"Он может кодировать сотни роботов с точки зрения их траекторий, происхождения, назначения и взаимоотношений с другими роботами, и он может делать это эффективным способом, повторно используя вычисления между группами роботов", - говорит Кэти Ву, доцент Кафедры гражданского строительства и охраны окружающей среды им. Гилберта Уинслоу (CEE) и сотрудник Лаборатории информации и систем принятия решений (LIDS) и Института данных, систем и общества (IDSS).
К Ву, старшему автору статьи об этой технике, присоединяется ведущий автор Чжунся Янь, аспирант кафедры электротехники и компьютерных наук. Работа будет представлена на Международной конференции по обучающим представлениям.
С высоты птичьего полета пол роботизированного склада электронной коммерции немного напоминает быстро развивающуюся игру "Тетрис".
Когда поступает заказ клиента, робот перемещается в определенную часть склада, берет полку, на которой хранится запрошенный товар, и доставляет его оператору-человеку, который выбирает и упаковывает товар. Сотни роботов делают это одновременно, и если пути двух роботов пересекают огромный склад, они могут разбиться.
Традиционные алгоритмы, основанные на поиске, позволяют избежать потенциальных сбоев, удерживая одного робота на заданном курсе и перестраивая траекторию для другого. Но при таком количестве роботов и потенциальных столкновениях проблема быстро растет в геометрической прогрессии.
"Поскольку склад работает онлайн, роботы перепланируются примерно каждые 100 миллисекунд. Это означает, что каждую секунду робот перепланируется 10 раз. Итак, эти операции должны быть очень быстрыми ", - говорит Ву.
Поскольку время при перепланировке очень важно, исследователи Массачусетского технологического института используют машинное обучение, чтобы сосредоточить перепланировку на наиболее активных участках скопления людей — там, где существует наибольший потенциал для сокращения общего времени в пути роботов.
Ву и Ян создали архитектуру нейронной сети, которая одновременно учитывает работу небольших групп роботов. Например, на складе с 800 роботами сеть может разделить складское помещение на более мелкие группы по 40 роботов в каждой.
Затем она предсказывает, какая группа обладает наибольшим потенциалом для улучшения общего решения, если бы для координации траекторий роботов в этой группе использовался решатель на основе поиска.
Итерационный процесс, общий алгоритм выбирает наиболее перспективную группу роботов с помощью нейронной сети, разделяет группу с помощью решателя на основе поиска, затем выбирает следующую наиболее перспективную группу с помощью нейронной сети и так далее.
Нейронная сеть может эффективно рассуждать о группах роботов, поскольку она улавливает сложные взаимосвязи, существующие между отдельными роботами. Например, даже если один робот изначально находится далеко от другого, их пути все равно могут пересекаться во время поездок.
Этот метод также упрощает вычисления, кодируя ограничения только один раз, а не повторяя процесс для каждой подзадачи. Например, на складе с 800 роботами для сокращения группы из 40 роботов требуется использовать остальные 760 роботов в качестве ограничений. Другие подходы требуют рассуждений обо всех 800 роботах по одному разу для каждой группы на каждой итерации.
Вместо этого подход исследователей требует рассуждать о 800 роботах только один раз во всех группах на каждой итерации.
"Склад - это одно большое помещение, поэтому многие из этих групп роботов будут иметь некоторые общие аспекты более масштабной проблемы. Мы разработали нашу архитектуру так, чтобы использовать эту общую информацию", - добавляет она.
Они протестировали свою технику в нескольких моделируемых средах, в том числе в некоторых, созданных как склады, в некоторых со случайными препятствиями и даже в лабиринтоподобных условиях, имитирующих интерьеры зданий.
Благодаря выявлению более эффективных групп для устранения перегрузки, их подход, основанный на обучении, позволяет разгрузить склад в четыре раза быстрее, чем сильные подходы, не основанные на обучении. Даже с учетом дополнительных вычислительных затрат, связанных с запуском нейронной сети, их подход по-прежнему решал проблему в 3,5 раза быстрее.
В будущем исследователи хотят получать простую информацию, основанную на правилах, из своей нейронной модели, поскольку решения нейронной сети могут быть непрозрачными и трудными для интерпретации. Более простые методы, основанные на правилах, также могут быть проще внедрены и поддерживаться в реальных условиях роботизированного склада.