Хочу поделиться своей старенькой разработкой трансмиссии для гусеничного вездехода. Наилучший вариант надо делать на двух дифференциалах и двух моторах. А этот подойдёт, если нужна компактность. Для него нужен один дифференциал, один мотор и один сервомотор.
Принцип работы
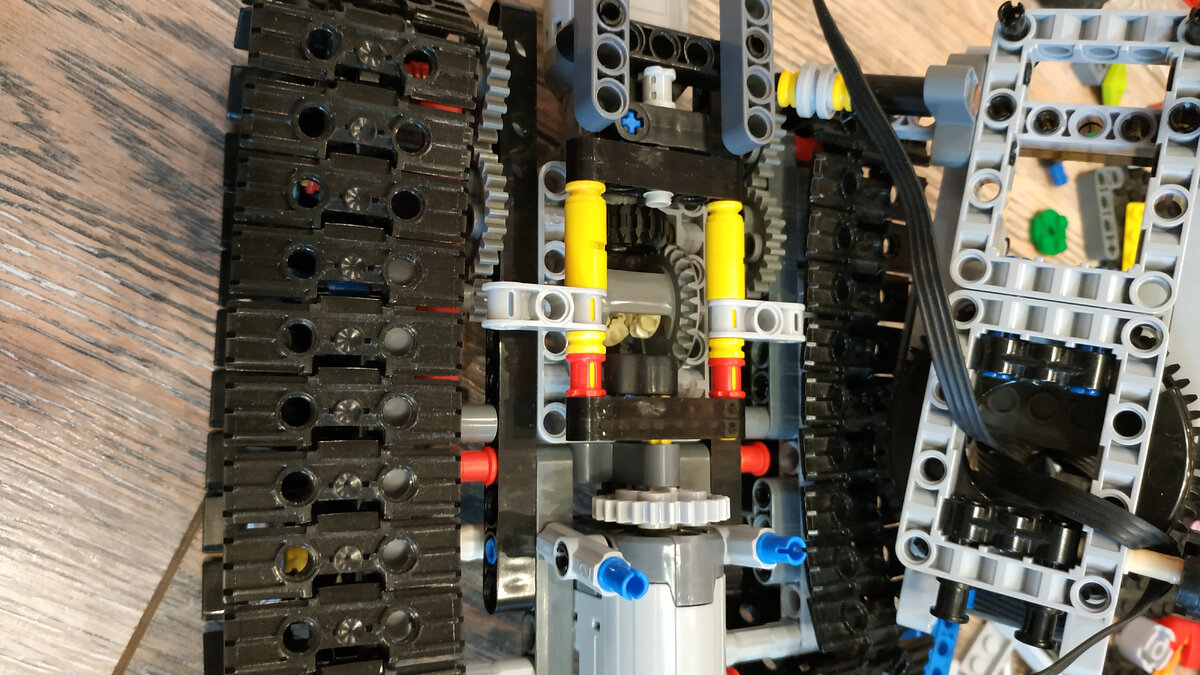
На дифференциал подаётся вращательное движение от мотора (в моём случае это XL motor из системы Power Functions). Две полуоси идут на правую и левую гусеницы с повышением крутящего момента с помощью шестерён 8 / 24. Передаточное отношение равно 3.
От вала сервомотора идёт так же понижение (в данном случае не скорости и крутящего момента, а угла поворота) в три раза теми же 8 / 24. То есть сервомотор может отклоняться от вертикали на 180° / 3 = 60°. К этой оси присоединены "рога", блокирующие полуоси.
При поворотах работает только одна из гусениц, но в два раза быстрее.
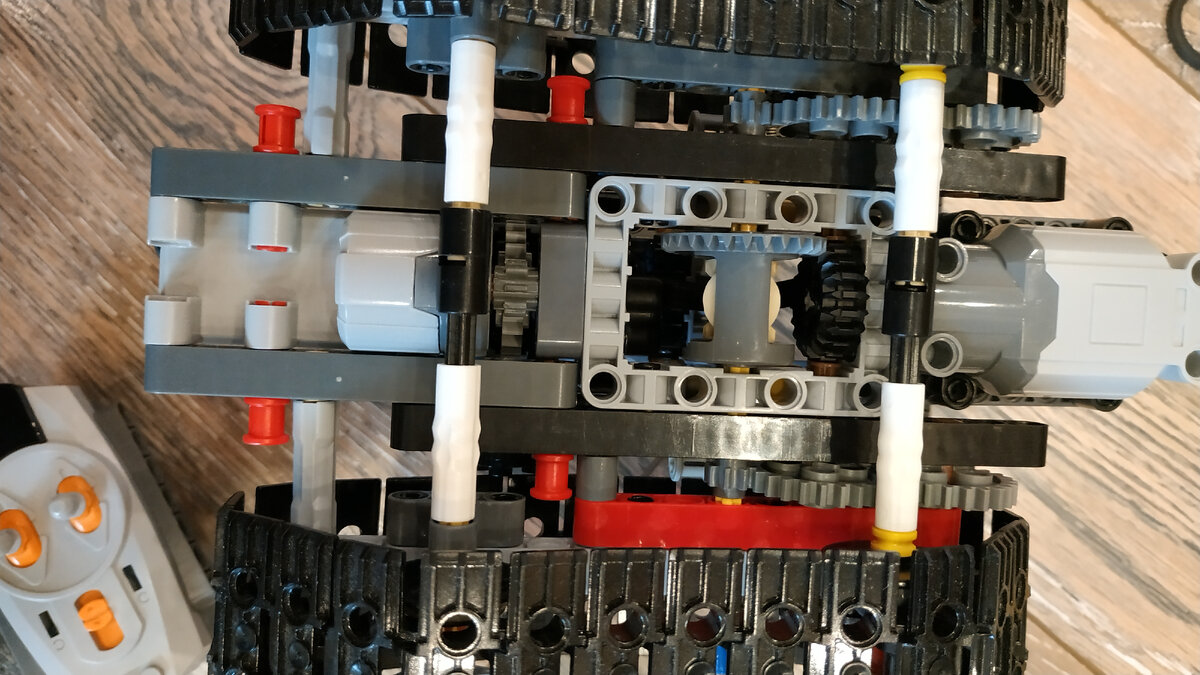
С другой стороны