Буксир-автомат не предполагает наличия человека на борту в штатном режиме работы. Управление автономное или в режиме дистанционного пилотирования.

За счет более простой конструкции, меньшего размера и отсутствия систем жизнеобеспечения достигается кратное снижение стоимости постройки и эксплуатации буксира по сравнению с буксиром аналогичной мощности, предполагающего наличие экипажа на борту.
Разработка буксира-автомата направлена на решение проблемы диспетчеризации движения судов в узком бассейне: существующая технология швартовки с применением канатов небезопасна в узком бассейне более чем с одним судном.
Возможность маневрирования грузового судна в узком бассейне с применением азимутальных буксиров-автоматов (АБА) за счет жесткой сцепки позволит снять диспетчеризацию и кратно повысить пропускную способность портов в морской зоне.
Решаемые задачи:
1. Подход и швартовка к грузовому судну во время движения грузового судна, и отшвартовка от грузового судна в автономном режиме.
2. Эскортирование грузового судна во время лоцманской проводки в режиме дистанционного пилотирования.
3. Постановка грузового судна к причалу во время швартовки в режиме дистанционного пилотирования.
Инновационные решения, позволяющие выполнять лоцманскую проводку и швартовку в автономном режиме:
• групповое управление всеми самоходными подруливающими устройствами как единым распределенным устройством;
• плоский горизонтальный киль;
• симметричный корпус;
• две азимутальные винторулевые колонки, расположенные в диаметральной плоскости судна;
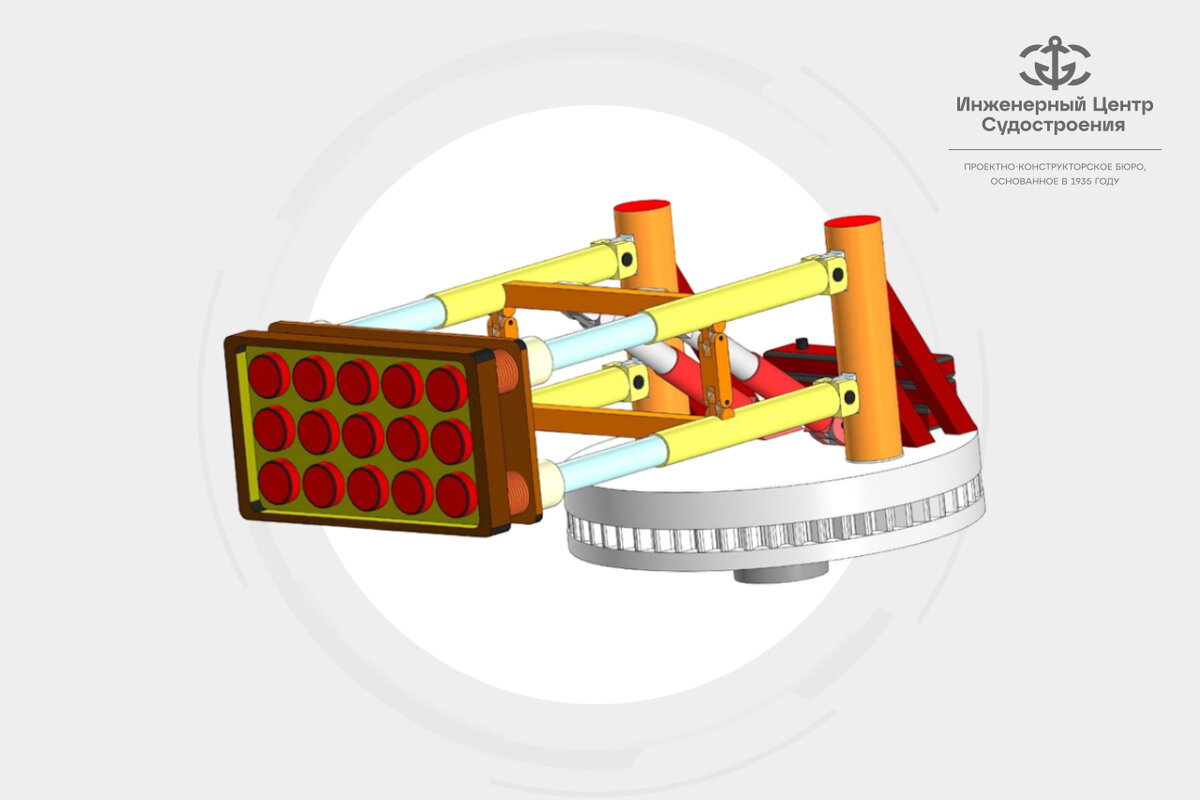
• электромагнитные швартовые устройства, обеспечивающие жесткую сцепку с корпусом судна;
• судовая электроэнергетическая установка компании ООО «РЭО» полностью реализована на электродвижении.
Проект разрабатывается совместно с Государственным морским университетом имени адмирала Ф. Ф. Ушакова для Министерства транспорта РФ за счет средств Минпромторга России.