Исследователи недавно представили инновационного робота, вдохновленного ящерицами, предназначенного для усовершенствования существующих моделей марсоходов для изучения сложного рельефа Марса.

Разработанный командой из китайского Нанкинского университета аэронавтики и астронавтики (NUAA), этот инновационный четвероногий робот создан с использованием 3D-печатной смолы и с удивительной точностью повторяет характерную ползающую локомоцию пустынных ящериц.
В рамках проекта исследователи разработали биомиметического четвероногого робота, смоделировав его кинематику по позвоночнику, ногам и ступням ящерицы. Кроме того, были созданы кинематические модели для координации движений, а аналитические прогнозы проверили способность робота ходить по прямой. Экспериментальные испытания подтвердили, что он подходит для марсоподобных рельефов, включая гранулированные почвы и скалистые поверхности. По словам исследователей, это достижение открывает перспективы для будущих миссий по исследованию Марса.
На 19 февраля 2024 года исследования Марса сосредоточены на геологии, минералогии и размещении приборов, а в будущем планируется создание инфраструктуры для полетов человека. Планетарные марсоходы обычно используют колесные конструкции для маневренности, но сталкиваются с проблемами на мягких почвах.
По мнению команды ученых, роботы на ножных колесах обладают лучшей маневренностью, но могут испытывать трудности при скольжении по почве. Роботы-скалолазы обладают способностью к захвату, но им не хватает баланса и скорости. Четвероногие роботы демонстрируют перспективу адаптации к марсианскому рельефу, но сталкиваются с проблемами устойчивости и клиренса.
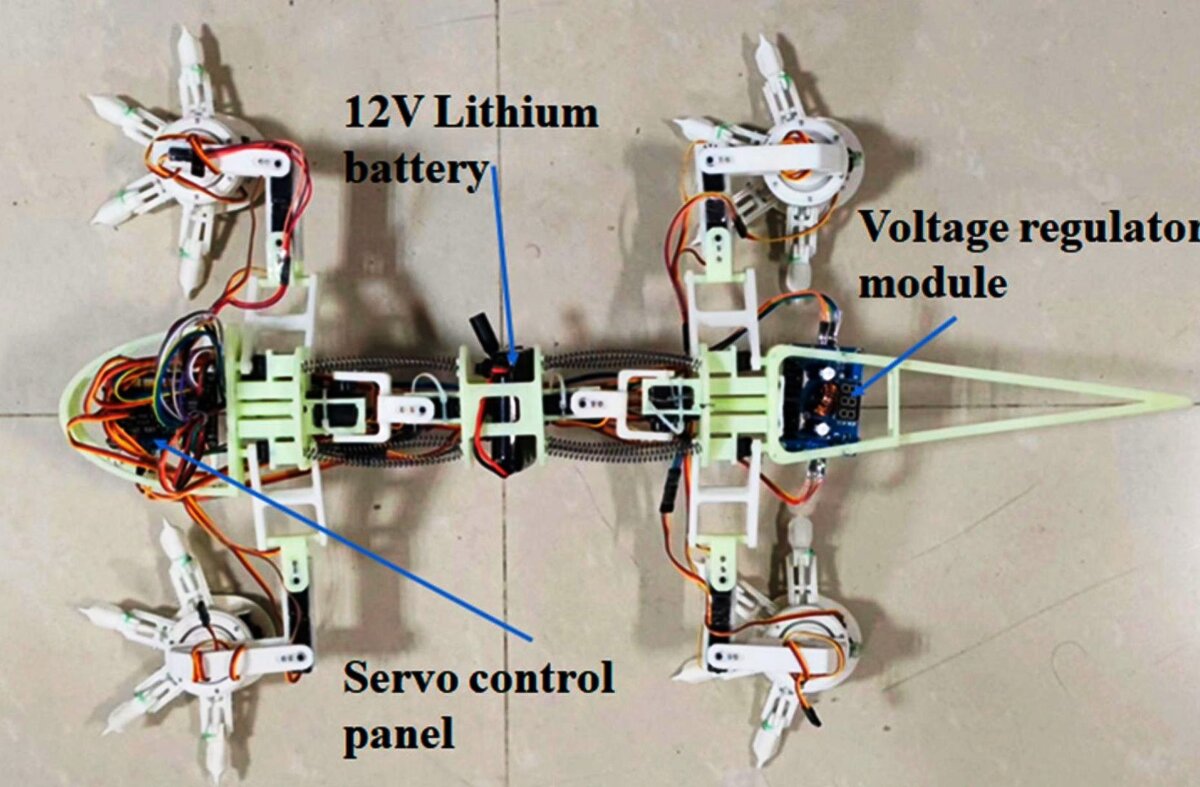
Биомиметический четвероногий робот, разработанный командой, имеет более низкий центр масс и обновленную структуру суставов для более стабильного движения. Робот оснащен четырьмя сервоприводами для гибкости и устойчивости, а также восемью пружинами для повышения несущей способности и снижения вибраций. Каждая нога имеет два шарнира для ползущего движения, а тазобедренный сустав с двумя сервоприводами обеспечивает стабильный подъем. Активная вращающаяся лодыжка и гибкие пальцы ног с когтями улучшают сцепление и адаптацию к местности.
Работающий от 12-вольтовой литий-ионной батареи, робот-ящерица оснащен проводами, регуляторами напряжения и блоками управления для обеспечения стабильных маятниковых движений и эффективного захвата почвы и камней. По словам инженеров, добиться такой функциональности было непросто, потому что потребовались значительные усилия, время и тщательные расчеты, чтобы довести робота до ума.
Первоначально исследователи проанализировали скоординированные движения пустынных ящериц и составили различные кинематические модели для имитации их локомоции. Эти модели учитывали различные аспекты анатомии и поведения ящериц. Затем исследователи обучили роботов, используя эти модели и дополнительные расчеты. После обучения роботы повторяли модели ползания и передвижения, наблюдаемые у пустынных ящериц.
Тестирования проводились на смоделированном испытательном полигоне, чтобы оценить поведение робота при захвате гранулированной почвы, похожей на марсианскую местность. Пальцы ног эффективно захватывали поверхность почвы, демонстрируя угол захвата более 90° при работе двигателя.
При моделировании скалистой среды в гранулированные материалы были вмонтированы камни размером 60-120 мм для воспроизведения марсианской поверхности. Несмотря на некоторые отклонения от результатов моделирования из-за противодействия опорных пружин, робот двигался вперед со средней скоростью около 0.020 км/ч.
Внешние испытания подтвердили пригодность робота для работы в скалистой среде, причем улучшенная модель продемонстрировала более высокую производительность по сравнению с предыдущими итерациями. Робот карабкался по скалам, демонстрируя свою адаптивность и мобильность на сложных участках.
Ученые из NUAA утверждают, что созданный биомиметический робот продемонстрировал многообещающие возможности по захвату и передвижению как на гранулированных почвах, так и на скалистых поверхностях. Китайский робот на начало 2024 года демонстрирует прогресс в технологии роботизированной разведки внеземных сред.