Когда дорога занимает несколько дней, недель или месяцев и маршрут допускает более или менее значительные отклонения от курса, можно ориентироваться по звездам.
Если рядом сидит опытный штурман, а на местности достаточно ориентиров – хорошая карта поможет найти правильный путь.
Но если ты едешь за рулем автомобиля по разветвленной дорожной сети – тебе нужны более эффективные инструменты.
Давайте поговорим об автомобильной навигации. Сначала о ее истории.
Потребность в ней появилась вместе с развитием личного транспорта, когда каждый автовладелец вдруг получил возможность самостоятельно передвигаться по любой дороге. Начиналось все, конечно, с карт.
Это могли быть карты или атласы автомобильных дорог. С детства я помню, как, когда мы с мамой ехали куда-то в незнакомое место, я прокладывала маршрут по карте.
Для удобства навигации на картах и в атласах области разделяются на проименованные сектора, для каждого из которых можно легко найти соседние области. Кроме того, присутствует алфавитный перечень улиц и достопримечательностей, также с указанием секторов, в которых их можно найти. Основная проблема в том, что для использования карты водителю необходимо остановиться. Как ее можно решить?
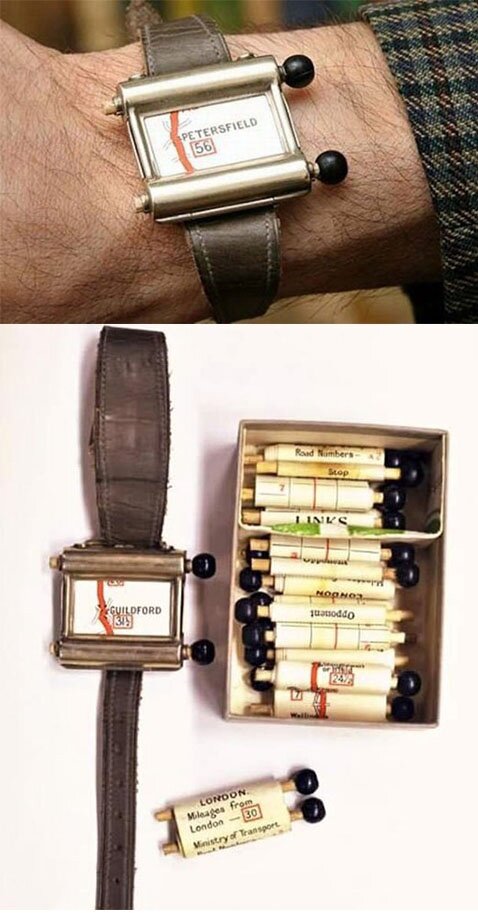
Еще в 1920-х годах в Англии появился первый портативный автомобильный навигатор - The Plus Fours Routefinder. Он представлял собой наручные часы, в которые вставлялись крошечные рулоны с картами, которые можно было прокручивать в процессе движения. Когда рулон заканчивался или маршрут выходил за зону, включенную на карту, рулон нужно было заменить на другой и промотать до нужного места.
В 1930 году в Италии появился первый навигатор Iter Avto, интегрированный с автомобилем. В него также нужно было вставлять рулон с картой, но прокручивалась она автоматически специальным механизмом, соединенным со спидометром. Рулончики с картами также нужно было сменять вручную.
Но уже в 1966 году компания General Motors предложила навигационную систему, основанную на перфокартах. Планировалось каждые 3-5 км встраивать в дорожное покрытие магниты, которые считывались бы специальным устройством, и позволяли бы предупреждать водителя о поворотах, препятствиях, светофорах и т.д. Кроме того предлагалось оснастить автомобиль радиотелефоном для связи с диспетчером и вызова экстренных служб. Как вы понимаете, распространения эта система не получила в виду своей сложности и низкой масштабируемости.
В 1981 году Honda запатентовала автономную инерциальную навигационную систему, позволяющую с помощью гироскопического эффекта и связи устройства с коробкой передач отображать местоположение автомобиля на пленочной карте (уже не рулоны, а кассеты, каков прогресс!)
В 1985 году компания Etak представила навигатор, определяющий положение автомобиля с помощью компаса и связи с неведущими колесами и хранением карт на кассетах.
Но уже было понятно не только то, что навигационная система в автомобиле - это хорошая и востребованная идея, но и то, что она не должна быть связана с самим автомобилем, а также наземными контрольными пунктами, радиомаяками и тд.
Тем более что к этому моменту уже появилась спутниковая навигация GPS, позволяющая отказаться от этих сложных конструкций.
И вот в 1990 году компания Mazda выпустила на рынок первый GPS-навигатор – пока встроенный в автомобиль, но это уже оказалось прорывом. С этого момента автомобильные GPS-навигаторы стали развиваться и плодиться, как грибы после дождя.
В целом схема работы понятна – есть оцифрованные карты, есть GPS-модуль. Местоположение автомобиля определяется и отображается на карте. Но это все еще не тот уровень, к которому мы привыкли.
Остро встает вопрос актуализации карт. Ускоряется не только автомобилестроение и компьютеризация, увеличивается и темп дорожного строительства. Карты, загруженные во встроенные навигационные системы, устаревают и становятся малоактуальными в течение нескольких лет или даже месяцев. Если карты записаны на внешние носители, например, CD-диски, их все равно приходится регулярно актуализировать вручную (читай – покупать новую версию).
Автомобильные навигаторы выпускались как отдельные устройства или интегрировались в бортовой компьютер автомобиля.
Так продолжалось до того, как в 2011 году Audi представила навигационный модуль с картами Google, загружаемыми из интернета. Это была победа. Кроме того, появление смартфонов, а также расширение зоны покрытия и повышение скорости мобильного интернета позволили каждому желающему иметь в кармане собственный полноценный навигатор.
Определение точного местоположения перестало быть проблемой. Актуализация карт – тоже (пользователю не нужно думать об этом, для этого существуют огромные компании типа Яндекс и Google и сообщества энтузиастов вроде OpenStreenMaps).
Умные алгоритмы строят маршруты с учетом способа передвижения (пешком, на велосипеде, общественном транспорте, легковом или грузовом автомобиле), пробок, платных участков, временных дорожных событий (перекрытия, ДТП, ремонтные работы). Если еще лет 10 назад можно было «соревноваться» с Яндекс навигатором в поиске более быстрого маршрута, то теперь это стало практически заведомо проигрышным делом.
Мы пользуемся этим каждый день и принимаем это как должное, хотя для достижения такой эффективности автомобильной навигации пришлось пройти долгий путь от бумажных карт до приложения в телефоне.
А теперь немного не об истории, а о задачах, стоящих перед автомобильной навигацией сейчас.
Во-первых, это, конечно же, оптимизация маршрутов и прогнозирование. Оффлайн-навигаторы строят маршрут по имеющимся данным, без учета дорожных событий и пробок, при этом используя мощности устройства. Онлайн-навигаторы типа Яндекса не имеют этих ограничений, маршрут запрашивается у сервиса и передается на устройство. При этом возможен учет большего количества факторов и расчет более точного прогноза.
Во-вторых, вспомогательные функции. Кроме непосредственного указания маршрута для водителя, возможно развитие дополнительных функций вроде прогнозирования расхода топлива в зависимости от скорости и стиля вождения и марки автомобиля с подключением системы поддержки принятия решений по необходимости дозаправки топлива на маршруте с учетом стоимости топлива на разных АЗС.
Решением этой задачи достаточно плотно занимаются транспортные компании, машины которых проезжают суммарно десятки и сотни тысяч километров в сутки. Зная цены на каждой АЗС, можно реализовать алгоритм, оптимизирующий затраты на топливо на конкретном маршруте, и дать водителю четкие рекомендации по тому, сколько топлива и на какой АЗС ему необходимо заправить. Система оптимизации топливных затрат, в разработке которой я участвовала, позволяла сэкономить в среднем около 15% по сравнению с применением рекомендаций, сформированных опытным диспетчером.
Кроме того, грузоперевозки как достаточно строго регулируемая деятельность, требуют учета таких специальных факторов, как состояние водителя, возможность отдыха на специализированных стоянках с учетом типа груза, проезда зон с ограничением движения крупногабаритных транспортных средств, туннелей, мостов и пунктов весогабаритного контроля и т.д., что не реализуется массовыми навигационными системами. Поэтому для отдельных видов деятельности разрабатываются специализированные навигационные системы.
В-третьих, развивается связь между системами навигации и бортовыми компьютерами беспилотных автомобилей, что требует значительного повышения точности определения местоположения транспортного средства для обеспечения полноты и достоверности информации, на основе которой компьютером будут приниматься решения о воздействии на системы управления автомобилем.
Так что автомобильной навигации еще есть к чему стремиться. Возможно, через 10-15 лет мы будем вспоминать современные навигаторы с такой же ностальгией, как сейчас вспоминаем туристические карты, бывшие раньше неизменными спутниками путешествий.
Автор: Карина Соловьева.