Для эффективного освоения подводных месторождений углеводородов необходимо детальное моделирование морских операций с использованием данных оперативной океанографии для оценки условий окружающей среды и прогнозирования поведения нефтяных пятен в случае аварийных ситуаций.
Традиционно для добычи на морском шельфе использовались обитаемые надводные стационарные платформы с сотнями человек персонала. Однако в последние годы все больше внимания уделяется автоматизации и роботизации, что позволяет снизить риски и повысить эффективность освоения месторождений. Так, к 2016 году технология подводных добывающих комплексов (ПДК) была реализована на 130 морских месторождениях. В России подводные добычные комплексы работают на Сахалине.
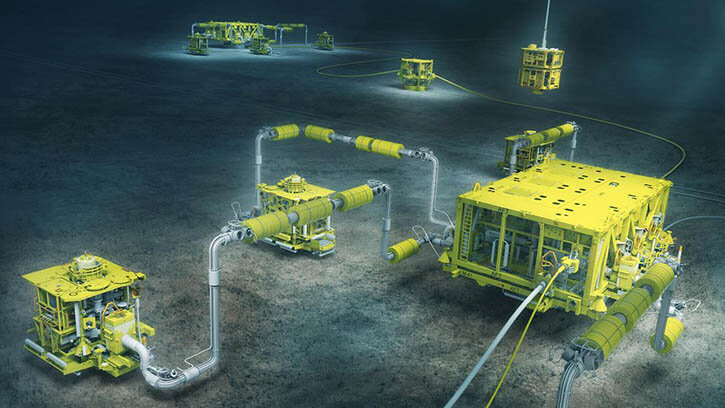
Классическая схема освоения подводных месторождений предполагает использование многочисленных судов, с которых ведутся геологоразведка, освоение, ввод в эксплуатацию и сама эксплуатация месторождения. Это длительный и дорогостоящий процесс, требующий мобилизации судов, транзита на большие расстояния, ожидания погодных окон и работы с удержанием позиции.
Резидентная робототехника в мире
Для повышения производительности и сокращения операционных затрат используются инновационные технологии, такие как подводная резидентная робототехника. Например, на проекте Ормен Ланге (Норвегия) контроль и мониторинг в районе месторождения осуществляют автоматические донные станции, образующие посредством гидроакустической связи и безэкипажной дистанционно управляемой надводной платформы сетевой интернет вещей с выходом через спутниковый радиоканал на береговой центр управления.
Резидентная робототехника – новейший класс морских робототехнических комплексов (МРТК) для постоянного функционирования на акватории с базированием на подводные доковые станции для подзарядки, смены инструмента, реконфигурации и связи с береговым или судовым центром управления.
Основу составляют гибридные необитаемые аппараты (ТНПА/АНПА) интервенционного класса, выполняющие осмотр и мониторинг; работу с гидравлическими разъемами и поворотными клапанами, подключение электрических кабелей ПДК, очистку разъёмов, отбор проб жидкостей или грунта; замену сменных блоков ПДК.

Управление резидентным МРТК обеспечивается через доковые станции, подводные ретрансляторы и/или на основе встроенных интеллектуальных адаптивных систем автономного функционирования и взаимодействия с другими роботами (элементами групповой технологии).
Большинство доковых станций имеют собственный приборный отсек с процессинговым модулем, высокоскоростной канал цифровой проводной или беспроводной (4G) связи с береговым центром управления, бесконтактные разъемы электропитания (для подключения и подзарядки различных типов аппаратов) и т.д.
Резидентная робототехника в России
В России внедрены подводные добычные комплексы на Сахалине, и есть тренд развития подводной робототехники и сопутствующих технологий для освоения и эксплуатации морских месторождений, что подтверждает программа инновационного развития ПАО "Газпром".
АО "НПП ПТ «Океанос» и СПбГМТУ в инициативном порядке разрабатывают инновационные элементы единого комплекса резидентной робототехники, подводный и волновой глайдеры, манипуляторный комплекс, кастомизированные ТНПА, морские групповые технологии.
Первый демонстратор технологий легкого интервенционного автономного необитаемого подводного аппарата АНПА (ЛИ АНПА) с 5-ти степенным электрическим манипулятором (МК) создан в 2018 г.
В аппарате кроме адаптивной программно-модульной системы управления реализованы системы гидроакустической навигации, технического зрения, безджойстикового управления МК, беспроводной подводной оптической связи со скоростью передачи данных до 20 Мбит/с и др. Аппарат работает в дистанционном и автономном режимах.
Программное обеспечение ЛИ АНПА позволяет мобильно реконфигурировать системы управления верхнего и среднего уровня, дополнять список задач и корректировать уже поставленные миссии.
В ходе натурных испытаний и исследований на полигоне подводной робототехники испытательного бассейна СПбГМТУ успешно отработаны дистанционные работы МК на макете подводной панели ПДК через оптический канал связи видеосистемы и телеметрии ЛИ АНПА и автоматический выход ЛИ АНПА и удержание целевой позиции в процессе работ. Работа подводного робота-резидента ЛИ АНПА с различным подводным инструментом и процесс забора грунта.
Параллельно, ведется работа по созданию единой океанологической обсерватории/сервисной донной станции для группы разнородных МРТК.
Для управления резидентной робототехникой эффективно применять технологию удаленного контроля. Удаленный пункт управления выполняет диагностику необитаемых аппаратов, находящихся в доке сервисной станции, анализирует выполнение миссий, формирует базу данных. Сюда же поступают данные с сенсорной базы выносных приборов океанографических обсерваторий, результаты проверок состояния ПДК, данные телеметрии групп аппаратов, выполняющих миссии. Оператор пункта управления может удаленно управлять аппаратом в случае сервисных работ МК в районе ПДК или стыковки аппарата с доковой станцией.
АО "НПП ПТ «Океанос» разработала технологию удаленного контроля и управления резидентными МРТК на базе системы дальней связи LoRa. МЧС России во время морского натурного эксперимента по удаленному управлению ТНПА в целях мониторинга подводных потенциально опасных объектов успешно апробировала эту технологию.
Концепция донной многофункциональной океанографической обсерватории с базированием резидентной робототехники решает проблему круглогодичного экологического и экологического мониторинга, а также круглогодичной эксплуатации донной нефтегазовой инфраструктуры в тяжелых условиях Арктики. Снижение операционных расходов на подобные работы и вне Арктического региона будет востребовано на внутреннем и внешнем рынке.