Идея развития транспортной инфраструктуры на ближайшую перспективу Предполагается строительство нового вида железнодорожного транспорта, в качестве заместителя крупнотоннажного автодорожного транспорта («Фур»), включающий в себя использование нового вида железнодорожного транспортного средства и необходимую для этого модернизацию железнодорожной инфраструктуры.
Предлагается не просто новое транспортное средство, а модель транспортировки, подразумевающая новое транспортное средство. Реализация данного инфраструктурного проекта может быть одним из числа национальных проектов нашей страны, потребует фокусировки внимания и мобилизации некоторой части ресурсов в масштабах всей страны.
Платформа
Транспортное средство
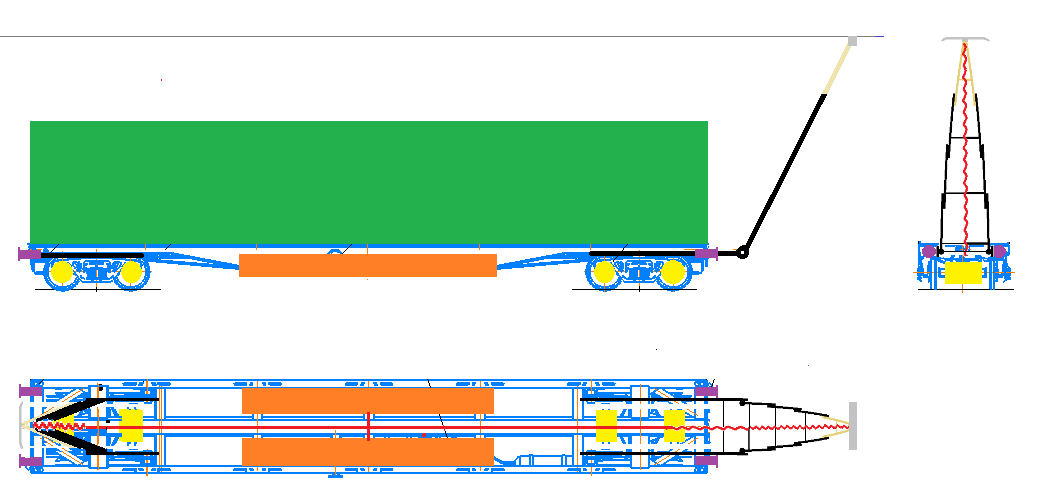
Транспортное средство представляет собой автономную беспилотную самодвижущуюся железнодорожную платформу на электрической тяге с питанием как от контактной сети через выдвижные телескопические токосъёмники, расположенные по обоим торцам платформы (на рисунке схематично чёрным), так и от бортовых аккумуляторных батарей, (на рисунке схематично оранжевым) используемых на участках путей, не оснащённых контактными сетями, а также при операциях роспуске и составления платформ. Телескопические секции токосъёмника изготовленные из карбона (чёрный цвет), и стеклопластика (верхняя секция - желтый цвет). В сложенном состоянии секции токосъёмника прибираются под пол платформы. Силовой кабель, соединяющий токосъёмник с электрооборудованием платформы обозначен красным цветом.
У платформ нет функционально определяемых переда и зада, они функционально симметричны. Двигатели платформ (на рисунке схематично жёлтым) – постоянного тока номинальным напряжением 3кВ, реверсивные, с ровной характеристикой крутящего момента, с ничтожно малым шагом его изменения, обеспечивающие платформе возможность плавно или резко меняющегося знакопеременного ускорения, маневровый и крейсерский ход в обоих направлениях движения, с возможностью работы в режиме генератора для возврата электрической энергии в сеть постоянного тока 3кВ и/или зарядки накопителей электрического заряда при торможении (режим рекуперации). Суммарная мощность электродвигателей на одну платформу должна быть порядка 0.5 - 0.6 МВт. Энерговооружённость платформ должна быть достаточной для обеспечения крейсерской скорости движения на горизонтальных участках путей: для единичной платформы с контейнером минимум 160-180 км/ч, и в составе с другими платформами или без контейнера до 250 км/ч. Трансмиссия должна обладать редуктором, может быть с двумя/тремя переключаемыми понижаемыми передачами с целью обеспечения платформы с полной массой возможности самостоятельного преодоления не протяжённых участков путей с относительно большим уклоном, таким, что на пороге сцепления колёс с рельсами. Энерго-запас аккумуляторов около 0.125 МВт⋅ч (в свинцово-кислотных аккумуляторах около 3000кг, в литий-ионных значительно меньше). Платформы также должны быть оснащены понижающим однофазным трансформатором с выпрямителем тока для возможности эксплуатации по путям, оснащённым переменным током 25кВ.
В качестве замены массива аккумуляторных батарей или в дополнение к нему можно рассмотреть вариант компоновки оборудования платформ с установкой под её полом оппозитного ДВС или газотурбинного двигателя с передачей мощности на электро-генератор постоянного тока или напрямую механически к ведущим осям, и с резервуаром для дизельного топлива или для сжиженного природного газа на 500 – 1000кг, и может быть в недалёком будущем с накопителями водорода для работы топливных элементов, что будут установлены вместо двигателей сгорания. В таких гибридных и перспективных вариантах исполнения платформы будут независимы от наличия или отсутствия электрификации путей, что важно, на достаточно большой дистанции пробега.
Новое специально разработанное сцепное устройство платформы должно обеспечивать сцепку и расцепку платформ без помощи человека, в том числе и на ходу, на крейсерской скорости. В виду того, что каждая платформа сама обеспечивает своё собственное ускорение/замедление, сцепное устройство не обязано передавать тяговое/толкающее усилие, ему достаточно выполнять стабилизирующую роль. Сцепное устройство может представлять собой пару буферов с плоскими контактными поверхностями на шарнирах, расположенных на торцевой стороне платформы (фиолетовым цветом на рисунке), работающих как на растяжение, так и на сжатие, оборудованные электромагнитными замками или механически переключаемыми замками на постоянных неодимовых магнитах для цели прижатия и фиксации контактных поверхностей буферов смежных платформ друг к другу в состоянии сцепки и их отталкивания/демпфирования при процессе сцепке и расцепке. Таким образом данные операции на ходу в условиях поперечной асинхронной раскачки стыкуемых платформ, возникающей из-за неровности полотна или бокового ветра, вполне осуществимы.
Даже в отсутствии каких-либо механических или электромагнитных замков на сцепном устройстве или в дополнение к ним можно обеспечить стабильное прижатие платформ в составе друг к другу за по средствам контроля распределения тягового усилия электродвигателей каждой платформ состава по отдельности, что будет обеспечиваться согласованной работой бортовых компьютеров всех платформ состава. Так, при движении с положительным ускорением по ходу движения больше тяги подаётся на последнюю платформу состава и при движении с отрицательным ускорением по ходу движения (при торможении) больше нагружается оборудование (двигатели в режиме рекуперации и/или фрикционный тормозные устройства) первой платформ по ходу движения. При движении без ускорения двигатели первой платформы по ходу движения могут быть переведены на малый режим рекуперации за счёт большей нагрузки двигателей последнего вагона по ходу движения. При этом вполне возможно и то, что динамический напор набегающего потока воздуха, воздействующий на передний торец первой платформы по ходу движения обеспечит достаточную силу прижатия платформ состава и без необходимости включения вектора тяги её двигателей против вектора скорости состава. На стоянке фиксация прижатого состояния платформ состава друг к другу при отключении тяговых электродвигателей обеспечивается фрикционным стояночным тормозом каждой платформы состава.
Подразумевается как минимум 4 вида платформ:
- Открытая платформа с плоским дном для перевозки техники.
- Платформа - контейнеровоз.
- Вагон - фургон, подобный товарному вагону.
- Вагон - фургон холодильник/морозильник.
Возможно изготовление различных типоразмеров платформ для различного тоннажа и объема перевозимого груза. Для вагонов - фургонов возможна установка на крыше классического типа токосъёмников, но тут необходима проверка по высоте ворот и потолков складов, куда этот вагон может быть подан. Также для существенного улучшения аэродинамики на торцах вагоновфургонов с верхним положением токосъёмника возможно сооружение надуваемых или развёртываемых аэродинамических обтекателей из подходящего материала и подходящей конструкции. При роботизированной компоновке составов из самодвижущихся платформ такие вагоны по возможности нужно ставить головными и замыкающими для улучшения аэродинамического качества всего состава.
Для обеспечения безопасности каждая платформа оснащается автономными средствами контроля и безопасности движения: бортовым компьютером, приборами наблюдения за окружающей обстановкой и внешней сигнализации: камеры различных спектров видимости, прожекторы, радары/лидаы/сонары, звуковая сигнализация и т.п. из числа необходимого и достаточного для обеспечения безопасности движения. Бортовые компьютеры платформ находятся на постоянной радиосвязи связи с автоматическим диспетчерским центром, а также обмениваются информацией с бортовыми компьютерами других находящихся по близости платформ для цели согласования совместного движения и совершения манёвров.
Платформы могут принадлежать и эксплуатироваться разными транспортными компаниями, в том числе РЖД. Это позволит привлечь частный капитал к реализации проекта. Но единая роботизированная диспетчеризация осуществляется оператором железнодорожных сетей, то есть РЖД.
Также можно рассмотреть и заложить в конструкцию платформы переменное значение ширины колеи. Можно сделать так, что-бы колёса могли перемещаться вдоль своих осей по шлицевому соединению с надёжной фиксацией положения (фиксации размера колеи). Таким образом на государственных границах при переходе на европейскую колею и обратно на нашу не нужно будет менять сами тележки. Платформа просто проедет по калибровочному участку путей плавно сужающейся или расширяющейся колеи. После прохода зафиксируется новое положение колес на своих осях. Очевидно то, что конструкция и габаритные размеры «токосъёмника», и электрическая схема в целом должны обеспечивать возможность эксплуатации в сетях других регионов континента. В странах ЕС или в отдельных его странах, а также в странах Азии должна быть создана своя диспетчерская служба, но работающая на единых (общих) с нашей стандартах, и которой в ходе операционной деятельности будет передаваться или от которой будет приниматься управление исходящими из и входящими в нашу зону ответственности платформами. Это существенно расширить географические возможности использования платформ, и является действенным инструментом «сшивания» Евразийского континента и проявлением нашего технологического и организационного лидерства в данном вопросе.
Наземная транспортная инфраструктура
Необходимо наличие электрифицированных путей сообщения, за исключением подъездных путей к пунктам погрузки/разгрузки. Развитие сети железнодорожного транспорта через подведение ж/д путей ко всем крупным складским и перевалочным комплексам, находящимся вблизи больших городов или в городской черте, строительство таких комплексов там, где их нет. Подведение ж/д путей к крупным фабрикам, заводам, индустриальным зонам, морским и речным портам, аэропортам, там, где это ещё не осуществлено, но технически осуществимо. В виду того, что скорость движения по таким подъездным путям будет невысокой, технические требования к таким путям в отношении неровности полотна, минимальной величины радиуса поворота, максимальной величины уклона могут быть не строгими. Это удешевит строительство подъездных путей.
Управление флотом беспилотных платформ осуществляется через единую автоматизированную информационную систему - автоматического диспетчера, с использованием существующих и новых перспективных каналов связи. В целях повышения безопасности движения наблюдательные камеры должны расставляться по всей протяжённости ж/д путей и быть подключены к автоматическому наблюдателю с искусственным интеллектом. Железнодорожные станции любого типа и назначения, расположенные на пути следования платформ, должны предоставлять возможность сквозного безостановочного прохода платформ через них. Платформы не должны стоять в очереди на проход через станцию, пропускают они только пассажирские поезда, и то, если те движутся быстрее.
Порядок использования
Транспортные компании, в том числе РЖД, оперируют флотом беспилотных платформ
- Заказчик транспортной услуги через интернет портал фрахтует транспортную единицу, в следствии чего она ему подается в автоматическом режиме в указанный пункт загрузки и в указанное время.
- Заказчик производит погрузку груза и через портал, указывает пункт разгрузки.
- Платформа отправляется в пункт назначение в автоматическом режиме. Автоматический диспетчер управляет движением платформы на перегонах, на станциях, производит контроль за переводом стрелок по пути движения.
- По приходу платформы в пункт разгрузки заказчик обеспечивает разгрузку платформы и через интернет сдаёт её оператору. Оператор в автоматическом режиме отводит платформу для выполнения следующего заказа, или отправляет платформу в депо/станцию для ожидания следующего заказа или для целей технического обслуживание, в том числе чистки тары.
- Заказчик оплачивает оператору арендную плату за пользование платформой, основанной на протяжённости маршрута и времени простоя под загрузку и разгрузку.
Манёвры платформы на территории заказчика могут контролироваться самим заказчиком по средствам встроенного интерфейса управления платформой. У платформ должна быть встроена система безопасности при маневрировании и «защита от дурака», поскольку заказчик может не обладать навыками управления платформой в совершенстве, интерфейс управления должен быть удобен, интуитивен, пользовательориентированный. Движение платформы на подъездных путях или при манёврах на территории заказчика, а также при проведении сцепной и расцепной операций обеспечивается аккумуляторными батареями, на перегонах используется электричество из контактной сети, в это же время производится зарядка аккумуляторов.
При наличии более одной платформы, движущихся в одном направлении на одном перегоне в одном промежутке времени, автоматический диспетчер организует сцепку данных платформ, образуя составы, состоящие из оптимального с точки зрения оптимального отношения экономии расходов и времени движения вагонов (предположительно порядка до 10 платформ в одном таком составе). Таким образом достигается экономия на удельном к транспортируемому тоннажу лобовом динамическом сопротивлении воздуха при движении подвижного состава, а также достигается оптимизация использования железнодорожной инфраструктуры за счёт упаковки платформ в составы. Также уменьшается износ контактной сети в виду того, что состав будет использовать только два токосъёмника крайних платформ состава.
Токосъёмники платформ, расположенные на стороне сцепки с другой платформой, складываются для возможности проведения сцепки двух платформ. Питание электродвигателей внутренних платформ состава - тех, что со сложенными токосъёмниками, обеспечивается через токосъёмники головной и замыкающей платформ. Для осуществления этой схемы питания сцепное устройство должно быть оснащено силовыми штепселем, однако, допускаю то, что при определённой конструкции этим устройством может быть сам сложенный токосъёмник, механически коммутирующий со сложенным токосъёмником смежной платформы. Сцепка может быть произведена как на станциях, так и прямо на ходу на перегонах, когда одни платформы догоняют другие платформы, по аналогии с тем, как это происходит со стыковками космических кораблей на орбите, только намного динамичнее в виду достаточной тяговооруженности участников стыковочной операции.
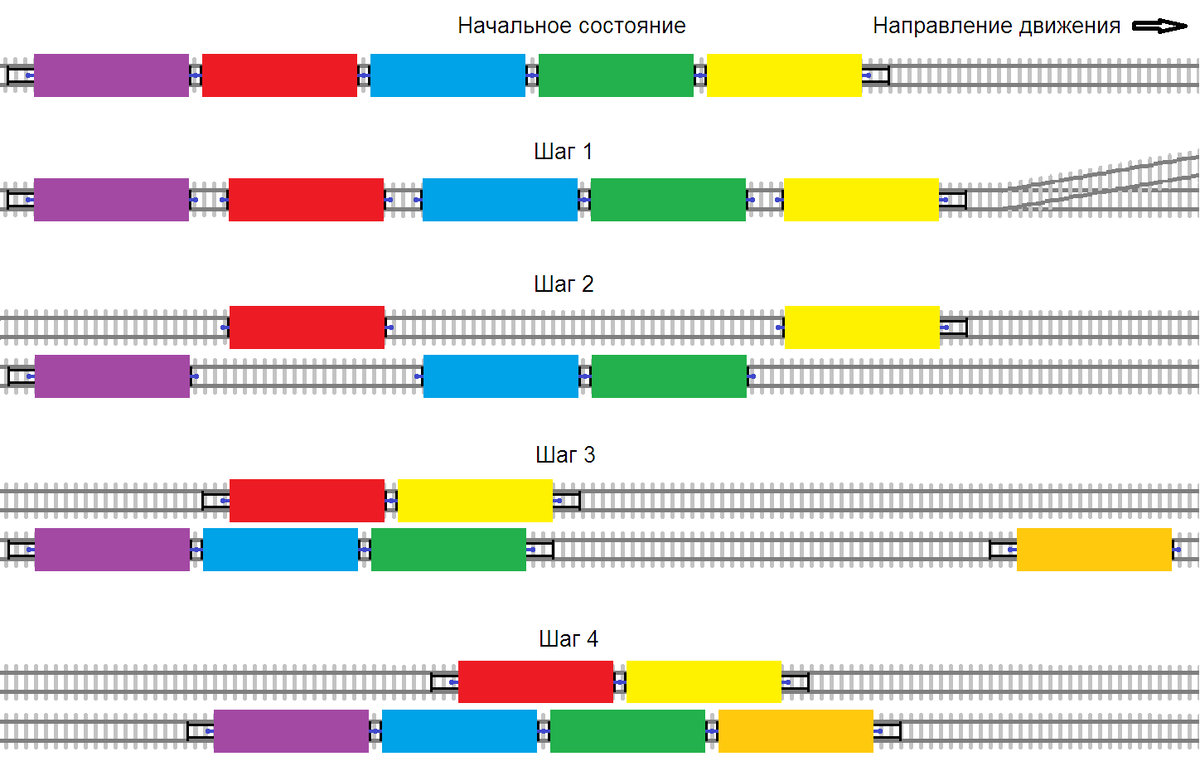
Данные операции осуществляются в автоматическом режиме, потому практически осуществимы и относительно безопасны. Расцепка платформ также может быть осуществлена в автоматическом режиме на ходу (рисунок). Необходимость расцепки возникает при расхождении дальнейших маршрутов следования платформ из одного состава (начальное состояние). В этом случае расцепка и разведение платформ друг от друга производится до прохождения разделяющей маршруты стрелки (шаг 1), после прохождения этой стрелки (шаг 2) остатки бывшего единого состава сцепляются заново (шаг 3), в том числе на ходу присоединяя к себе новых «попутчиков» на следующих участках маршрута, образуя новые составы (шаг 4).
Я представляю множество таких снующих днём и ночью по железнодорожным сетям страны роботов. Как же это «круто» выглядит со стороны, с одной стороны современно, прогрессивно, а с другой стороны основано на базе традиционного, хорошо себя зарекомендовавшего и одновременно романтического вида транспорта. не какой-то там эфемерный гиперлуп. И может быть так, что осуществление этого проекта представляется организационным вызовом, но с точки зрения современных технологий является достаточно простой задачей.
Преимущества перехода на данный вид транспорта в сравнении с использованием крупнотоннажного автотранспорта:
- Уменьшение удельной на одну тонну перевезенного груза амортизации транспортной инфраструктуры. Износ Ж/Д путей в стоимостном выражении меньше износа автодорог крупнотоннажным автотранспортом.
- Уменьшение удельной на одну тонну перевезенного груза амортизации подвижного состава. Ресурс ж/д платформ больше ресурса автопоездов.
- Упрощение требований при строительстве новых автодорог, мостов и ремонте старых, а следовательно экономия средств на автодорожной инфраструктуре. При прочих равных уменьшение необходимого количества полос движения на автомагистралях в отсутствии на них автопоездов.
- Уменьшение аварийности на автодорогах за счёт уменьшения количества обгонов автопоездов, отказов техники и человеческого фактора. Уменьшение тяжести и смертельности ДТП в виду отсутствия или существенного сокращения количества тяжёлой, гружёной техники на автодорогах.
- Повышение средней скорости передвижения по автодорогам за счёт уменьшения количества грузовых автомобилей на них.
- Удешевление стоимости транспортировки за счёт экономии на заработной плате водителей автопоездов.
- Сокращение времени транспортировки за счёт круглосуточного движения и большей средней скорости движения ж/д поездов.
- Увеличение энерго-эффективности перевозок и дополнительная экономия за счёт сравнительно меньшего удельного к полезной массе лобового сопротивления воздуха при движениях в составах и меньшего коэффициента трения качения.
- Ж/Д платформа в сравнении с автомобилем имеет только одну степень свободы (вперед - назад), также очевидна относительная в сравнении с автодорогами изолированность ж/д путей от общественного доступа. Всё это обуславливает более простую в реализации и более безопасную в эксплуатации систему автопилотирования подвижного состава в сравнении с внедрением таких решений для автопоездов.
- Уменьшение вредных эмиссий, а также уменьшение зависимости от углеводородного топлива за счёт использования электрической энергии (в перспективе от АЭС и возобновляемых источников). Альтернативное решение, основанное на использовании грузовых электромобилей имеет свои известные трудности в реализации, связанные с проблемой аккумуляторных батарей большого энергоёмкости для обеспечения приемлемого запаса хода и времени зарядки, или с другой стороны необходимостью тотального сооружения «троллейбусных» контактных сетей (такие изыскания проводятся в Германии в виду наличия развитой сети автобанов)
- Исторически в России сделан упор на железнодорожный транспорт и развита сеть путей сообщения, поэтому именно здесь описанная технология является органичным продолжением правильных решений минувших дней и будет иметь наибольший экономический эффект. Не стоит забывать, что «Фуры» как класс транспортных средств пришли к нам с «запада», где на определённом этапе развития упор был сделан в пользу развития автодорог и автотранспорта
Преимущества перед традиционным железнодорожным транспортом:
- Экономия на заработной плате машинистов, не такая выраженная в сравнении с автотранспортом, но все же есть.
- Сама концепция беспилотного движения одиночных платформ по произвольному маршруту, а также возможность автоматических комбинаций и ре-комбинаций составов из таких платформ на марше избавляет от необходимости сортировки вагонов и теоретически обеспечивает движение платформ без остановки с их допустимой для участков путей скоростью движения, что в свою очередь:
- существенно сокращает время доставки грузов из точки А в точку Б
- даёт возможность сократить размеры инфраструктуры сортировочных станций удельно к перевозимому тоннажу, что приведёт к экономии как удельных операционных затрат на содержание таких станций так и связанных с ними капитальных затрат.
Трудности и вызовы
- Необходимость разработки и внедрение системы управления беспилотными платформами и единой автоматической диспетчерской системы.
- Необходимость развития инфраструктуры путей сообщения и электрификации существующей путевой инфраструктуры, сооружения новых и дооснащение существующих складских и перевалочных комплексов.
- В ряде случаев существует необходимость перевалки груза или для контейнерных перевозок смены ж/д платформы на авто-платформу из-за невозможности подведения путей там, куда сейчас может подъехать крупнотоннажный автотранспорт, что приведёт к удорожанию транспортировки и увеличению времени транспортировки в некоторой небольшой доле из всего объёма транспортных услуг.
- Возможно то, что до наладки крупносерийного производства платформ, последние будут дороже в производстве, чем существующий автотранспорт в пересчете на грузоподъемность. Но с другой стороны, у России есть все отечественные компетенции и мощности для проектирования и производства данного вида транспорта, что может быть реализовано с локализацией 100%, а в последующем возможен экспорт платформ и сопутствующих технических средств в соседние страны, заодно с присоединением их к общей диспетчерской системе управления (как дополнительный инструмент интеграции экономического пространства). Все это приведет к удельному удешевлению производства и эксплуатации.