
Учёные из Токийского университета создали двуногого робота, чьи конечности приводятся в движение живой мышечной тканью. Ожидается, что такое решение позволит легко скопировать сложные движения людей и упростить обучение машин.
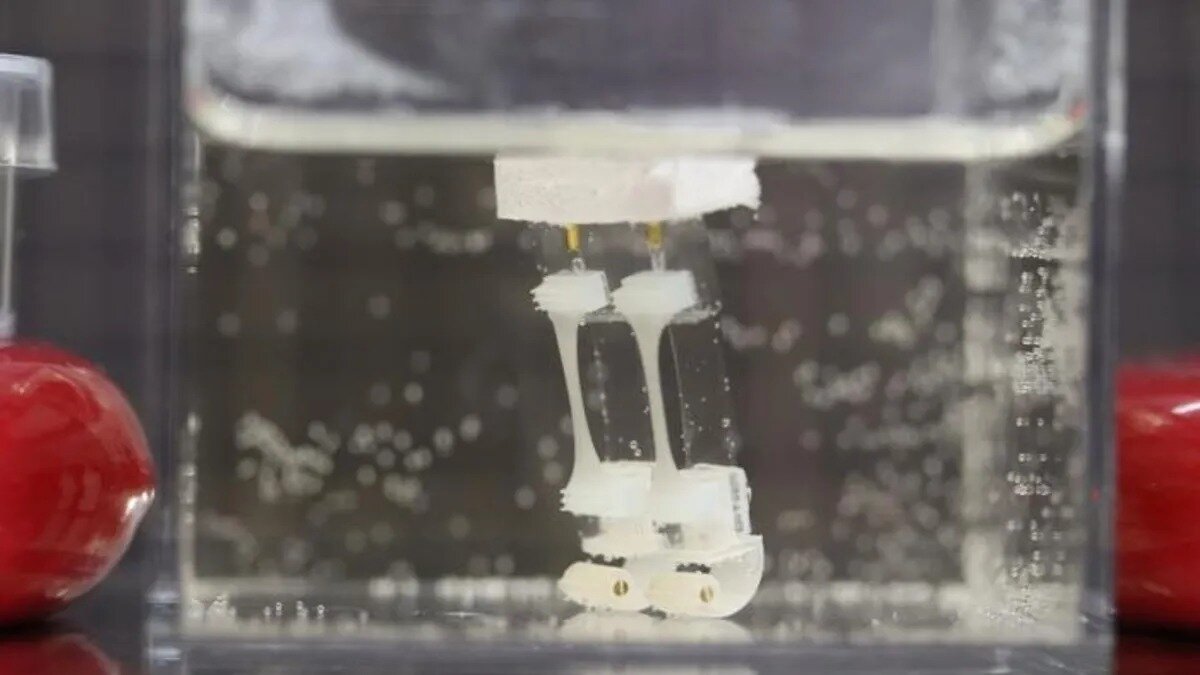
Обычные биогибридные роботы могут выполнять прямолинейные движения или слишком амплитудные повороты, однако у них возникают трудности с мелкой моторикой и хореографией в целом. Японцы придумали добавить культивированную скелетную мышечную ткань роботу. Живая ткань была натянута вдоль гибкой конструкции каждой из пластиковых ног робота, заканчивающихся поплавком, и вся конструкция была помещена в сосуд с питательным раствором.
Сокращение мышц происходило после пропускания тока через жидкость вблизи мышц от одного электрода к другому. Учёные вручную приближали электроды то к одной ноге, то к другой, заставляя их подниматься для шага вперёд. При отключении тока мышцы расслабляются, и нога опускается. Таким образом, были проверены режимы ходьбы по прямой и развороты на месте.
В будущем команда планирует снабдить суставы робота более толстой мышечной тканью — в таком случае двуногая машина сможет делать более сложные движения. В планах исследователей — разработать устройства подвода питания к мышцам, чтобы они могли работать на воздухе.